

Как собрать квадрокоптер своими руками в домашних условиях.
Особенности при сборке дрона самому
- Сначала принимаем решение по раме, выясняем её массу, узнаём размах пропеллеров, которые собираемся использовать;
- Выбирая двигатель, знакомимся на официальном сайте изготовителя с основными параметрами. К каждому мотору прилагается список рекомендуемых пропеллеров. Например, характеристики DYS D2822-14 1450KV можно узнать по его маркировке. В записи D2822 D — серия, 28 — сечение статора в миллиметрах, 22 — длина статора в миллиметрах. Строка 1450KV с характеристикой KV свидетельствует, при каких оборотах двигателя квадрокоптер может лучше всего зависать в воздухе над поверхностью земли. Основываясь на оптимальных оборотах kv, а также массе беспилотника, осуществляем подбор требуемых винтов, обладающих заданными характеристиками, чтобы достичь наилучших параметров дрона.
- Управление двигателем осуществляется посредством регуляторов питания. Бесколлекторные двигатели являются трехфазными и нуждаются в использовании переменного тока для своих цепей питания.
- Блок управления полётом беспилотника представляет собой наиболее ответственный узел каждого радиоуправляемого дрона. Он осуществляет управление двигателями посредством регуляторов питания и даёт возможность избежать повреждения квадрокоптера.
- Приёмник и передатчик. Приёмник представляет собой небольшой модуль, оснащённый антенной, призванной осуществлять приём сигнала от передатчика.
Базовые характеристики передатчика:
Квадрокоптер своими руками [Часть 1 — сборка и подключение]
- Режимы Mode1 или Mode2. В первом режиме ручка газа находится справа, во втором режиме ручка газа находится слева.
- Частота передатчика составляет 2,4Ггц.
- Число каналов. Минимум каналов, которые требуются для осуществления управления летательным аппаратом — четыре. Управляющее оборудование от Spektrum DX6 V2 with AR610 Receiver содержит 6 каналов.
Пошаговая инструкция
- Уменьшаем длину проводов на регуляторах. При подсоединении регулятора к моторам длина проводов будет значительно превышать длину луча на котором вся эта конструкция будет крепиться.
- Припаиваем коннекторы к концам проводов на регуляторе чтобы в дальнейшем можно было подключить регулятор к моторам.
- Припаиваем провода регуляторов к плате.
- Припаиваем провода коннектора к плате для подключения аккумулятора.
- Производим монтаж двигателей — привинчиваем по 1 двигателю на каждый луч.
- Осуществляем сборку рамы. Привинчиваем лучи к плате.
- Крепим регуляторы к лучам дрона хомутами.
- Подключаем провода регуляторов к двигателям. Кабели регулятора и двигателя соединяются в произвольном порядке. В дальнейшем может понадобиться изменение порядка подключения при окончательной конфигурации беспилотника. При использовании выделенных регуляторов для каждого двигателя, положительный и отрицательный полюс должны соединяться с контроллером, идя лишь от одного регулятора.
- Закрепляем на корпусе модуль управления двухсторонним скотчем. Его лучше всего расположить в центральной части платформы.
- Выполняем подключение регуляторов к модулю управления.
- Элероны — канал, отвечающий за левые и правые повороты;
- Элеватор — канал, руководящий направлениями вперёд и назад;
- Газ – канал, управляющий газом. Руководит выполнением взлёта и посадки, а также переменами высоты;
- Рысканье — канал даёт возможность производить вращение квадрокоптера вокруг его оси.Закрепляем на корпусе приемник двухсторонним скотчем и подключаем его к модулю управления. Приёмник должен быть расположен максимально близко к модулю.Назначение каналов описано в руководстве к приёмнику.
Эта операция завершает процесс сборки квадрокоптера.
Наладка
- Производим запуск двигателей. Активация двигателей нуждается в выполнении процесса запуска моторов — арминга. Руководство к эксплуатации подробно рассказывает каким образом этого добиться. Деактивация двигателей требует проведения процедуры дизарминга.
- Включаем слабый газ и убеждаемся, что моторы вращаются. Характер вращения должен быть таким же, как указано на схеме в руководстве к контроллеру. При неправильном вращении двигателя нужно просто поменять местами полюса проводов, идущих от двигателя к контроллеру.
- Привинчиваем вторую платформу к корпусу квадрокоптера.
- Подсоединяем к корпусу ленту с липучкой для крепления аккумулятора.
- Монтируем адаптеры на моторы.
- Устанавливаем пропеллеры, учитывая то, в каком направлении вращается каждый из двигателей.
Выполнив все необходимые тесты можно попробовать выполнить испытательный взлёт. Левый рычаг передатчика нужно наклонить вниз и вправо, затем постепенно добавить газа.
Источник: rusdrones.ru
Как самому собрать квадрокоптер. Принцип действия, детали, примеры

Сегодня публикую очередную статью зимнего Конкурса статей 2017-2018 года, которую прислал читатель Константин из Челябинска. Статья обзорная, Константин сам пытается разобраться в теме, но реальный квадракоптер он пока ещё не собрал.
Кстати, для тех, кто не хочет тратить время, квадракоптеры и запчасти к ним можно купить на АлиЭкспрессе. А кому интересно – давайте почитаем статью.
Также убедительная просьба ко всем, кто собирает или уже собрал дрон – делиться опытом в комментариях!
Принципы действия и постройки дрона
Самостоятельная сборка из комплекта деталей – всегда увлекательное занятие. В данном случае приобретается не только технический опыт, но и возможность увлекательного хобби. Ведь пилотирование квадракоптера – захватывающий процесс!
Покупка дрона (а лучше – конструктора) для ребенка от 14 лет – лучший подарок!
Стоит сказать, что дрон может быть опасен в неумелых руках. Он может сильно поцарапать пропеллерами, повредить другие вещи, и в итоге разбиться и поломаться. Поэтому при первых запусках нужно быть осторожным, и делать их на открытом пространстве при отсутствии ветра.
Квадрокоптер (дрон) представляет собой летательный аппарат, управление которым происходит при задействовании специальных передатчиков. Устройство оснащено 4-мя двигателями с аналогичным количеством винтов. В состав обязательно входит летающая многомоторная платформа. Эта платформа – основа любого дрона, с её выбора стоит начинать постройку.
При взлете беспилотник принимает горизонтальное положение и способен зависать в воздухе на разной высоте, как вертолет. Дроны собранные по типу Headless отличаются возможностью резкой перестройки траектории полета в любую сторону, при этом без поворота носов части конструкции. Независимо от взлета вверх или спуска вниз, устройство всегда сохраняет горизонтальную позицию по отношению к земле.
Это обеспечивается наличием гиродатчиков, как в гироскутерах и сигвеях.
Подробнее, как устроен сигвей, почему он не падает (а иногда и падает), рекомендую мою статью Устройство и ремонт сигвея.
Что потребуется для сборки простой модели дрона?
Самое первое, о чем думает каждый любитель, решивший собрать квадрокоптер собственными руками – это изготовление рамы для последующего крепления двигателей и прочих элементов. Доступным материалом в работе является фанера. Для небольшой и простой модели размер элемента составляет около 15 см 2 .
К нанесенной заранее на раму разметке при использовании винтов происходит крепление лучей. Разметка наносится по диагонали. Средняя длина луча не должна быть менее 30-см, из расчета от центра самого коптера. Длина балок – 25 см. Прежде чем проделать отверстия для непосредственной установки двигателей, также необходимо нанести на раму разметку.
Однако, если не опыта, лучше за самостоятельную постройку рамы не браться – ведь от неё зависит летные и весовые характеристики. Лучше купить готовую раму класса 450.

Рама – основа дрона
Дополнительными основными элементами необходимыми для сборки являются:
- Управляющая плата.
- Аппаратура радиоуправления Turnigy 9, аккумуляторы можно использовать этой же фирмы.
- Дополнительный силовой аккумулятор.
- Лопасти.
- Любое подходящее к аккумулятору зарядное устройство.
Обязательно нужен дополнительный аккумулятор! Поскольку для экономии веса аккумуляторы имеют малую емкость, и хватает их на несколько минут полёта.
Сборка в несколько шагов
Первым действием является установка управляющей платы, ее размещение должно быть максимально близким к центру платформы из фанеры. Для прикручивания лучей к плате используются саморезы. Чтобы закрепить аккумулятор и посадочные лыжи – можно использовать алюминиевую липкую ленту.
Приемник сигнала устанавливается в непосредственной близости к плате. Для этого вполне подойдет качественный суперклей. Соединение с платой происходит за счет 2-х трехжильных шлейфов, но только когда приемочный канал выполняет те же функции, что и канала на управляющей плате.
Для подключения платы управления нужно ознакомиться с инструкцией.
Следующим этапом является установка двигателей. Необходимо учитывать, что расстояние между краями платформы и осью вращения должно быть эквивалентно друг другу. Также необходимо предусмотреть отверстие для валового хвоста. Подготавливая отверстия, следует просверлить их насквозь на весь квадрат. Это нужно чтобы оценить будет ли вал цепляться за края.
Еще одним этапом сборки становится подключение проводки питания. Для этого процесса используются переходники или клеммы, из которых составляется параллельное соединение 4-х проводов. Также потребуется установка разъемного соединения в месте подключения к проводам батареи питания устройства. Во всех остальных местах производится спаивание для надежности.
Чтобы избежать поломки конструкции во время полета за счет вибрации, порыва ветра, резкой смены направления и т.д. все детали закрепляются при помощи термоусадки, хомутов, саморезов. После этого можно подключать провода драйвера к управляющей плате, и запускать режим тестирования для выявления проблем.
На что обращать внимание?
При самостоятельном сборе квадрокоптера как предложенного, так и более сложного варианта, необходимо учитывать несколько основных факторов:
- Первый дрон лучше сделать самым простым для выявления собственных ошибок в сборке.
- Всегда перепроверять все расчеты и замеры, чтобы избежать падения устройства, заносов в сторону и т.п.
- Не стоит приобретать некачественные детали для сборки, за счет которых повышается риск сбоев в работе оборудования.
- Обязательно проводить тестовый полет и своевременно устранять все возможные недочеты.
Нужно быть готовым к тому, что в первое время всё будет ломаться. Самое, что первое ломается – пропеллеры, двигатели, рама. Через некоторое время – аккумуляторы.
Лучше всего для начала взяться за изготовление простой, легкой модели, без камеры. Это нужно для того, чтобы научиться управлять. Потом, если это занятие не надоест, и будет возможность, можно браться за изготовление более солидной модели.
На этом статья Константина заканчивается, ждём продолжения с реальным аппаратом!
Если статья понравилась, голосуйте за неё при подведении итогов, которое состоятся в декабре. Чтобы ничего не пропустить, подписывайтесь и вступайте в группу ВК!
От Администратора блога
Добавлю дополнительную информацию по теме.
На видео ниже показаны примеры самостоятельной сборки квадракоптеров. Тут уже более профессиональные ребята:
Голосование
Проголосовать за статью, если она понравилась, можно здесь. Там же рассказано, как можно получить деньги, участвуя в Конкурсе репостов!
20
SHARES
Share on Facebook
![]()
Follow us
Рекомендую похожие статьи:
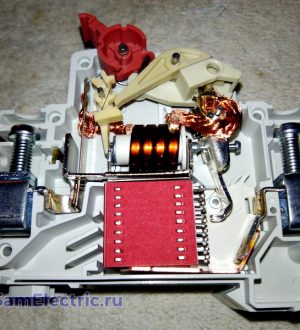
- Как устроен УЗО и дифавтомат
- Блок защиты галогенных ламп. Выбор, установка, подключение.
- Перестали гореть светодиоды в люстре. Анализ и ремонт
- Устройство электрического счетчика
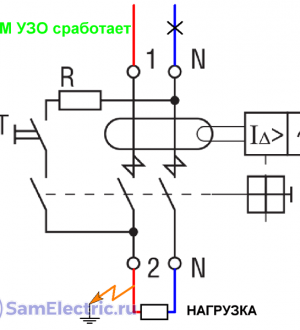
- Внутренняя схема электронного УЗО на тиристоре
- Как устроен защитный автомат
- Электрический обогрев: трудный выбор
Понравилось? Поставьте оценку, и почитайте другие статьи блога!
(2 оценок, среднее: 3,50 из 5)
Внимание! Автор блога не гарантирует, что всё написанное на этой странице — истина.
За ваши действия и за вашу безопасность ответственны только вы!
Предыдущая запись
Следующая запись
Рекомендую почитать на СамЭлектрик.ру:

Оставить комментарий Отменить ответ
Отправляя комментарий, Вы соглашаетесь с Правилами комментирования и разрешаете сбор и обработку персональных данных (имя + эл.почта). Политика конфиденциальности.
ЧТО СЕЙЧАС ОБСУЖДАЮТ:
- – Об авторе | 02 Апр, 12:15. Александр Константинович Кутелёв: «Молодец. Прямо елей на душу. Советская школа!»
- – Реле напряжения TOMZN TOVPD1-60-ЕС — обзор параметров и отзыв о работе | 30 Мар, 23:20. Сергей: «https://vk.com/wall-109281259_24543 Эту тему не читали?»
- – Реле напряжения TOMZN TOVPD1-60-ЕС — обзор параметров и отзыв о работе | 30 Мар, 22:54. Сергей: «Как- то так»
- – Реле напряжения TOMZN TOVPD1-60-ЕС — обзор параметров и отзыв о работе | 30 Мар, 22:49. Сергей: «Индикатор и байпас по такой схеме подключил.Вдруг реле выйдет из строя,или не включится.»
- – Реле напряжения TOMZN TOVPD1-60-ЕС — обзор параметров и отзыв о работе | 30 Мар, 22:46. Сергей: «Насчет диода-пересмотрел фотографии-нет для него места,с катушки дорожка идет на 6-й провод шлейфа ,на плате. «
- – Реле напряжения TOMZN TOVPD1-60-ЕС — обзор параметров и отзыв о работе | 29 Мар, 11:17. BoB4uk: «»Собрал щиток,установил туда индикаторную лампу. » Индикаторная о чем сигналит, включены или нет контакты реле? Можно. «
- – Реле напряжения TOMZN TOVPD1-60-ЕС — обзор параметров и отзыв о работе | 29 Мар, 10:46. BoB4uk: «Еще попался вот такой комментарий. «HC89F003 ещё один похожий на STM8S003F3P6 Очевидно что STM8S003F3P6 получили. «
- – Реле напряжения TOMZN TOVPD1-60-ЕС — обзор параметров и отзыв о работе | 29 Мар, 10:43. BoB4uk: «Кстати, они реагируют не только по техническим вопросам, но и по финансовым. В начале цена. «
Свежие статьи на СамЭлектрик.ру: 06.03.2023
Пожарная безопасность электроустановок. Почему УЗДП неэффективен
Статья Владимира Мельникова, специалиста Международного противопожарного центра, а также читателя и активного.

Далее 15.02.2023
Устройство современных умных счетчиков – на примере МИР С-05
Техника умнеет и повышает интеллект стремительными темпами. Умными стали и счётчики электроэнергии. Их.

Далее 30.01.2023
Схема Даландера. Реальные примеры подключения двухскоростного двигателя
Выкладываю фото и схемы практического включения двухскоростного электродвигателя по схеме Даландера. Статья.

Далее 05.01.2023
Сверлильный станок – восстанавливаем схему
Небольшая зарисовка на тему сверлильных станков. Перед таким станком я однажды очутился: Слова хозяина этого.
Источник: samelectric.ru
Самодельный квадрокоптер: Первый шаг к сборке

Итак, после долгих раздумий и выборов, а также основываюсь на уже имеющихся знаний о квадрокоптерах, мною было принято решение собирать кастомный квадрокоптер на базе рамы F450.
F450 — это популярная рама для сборки квадрокоптеров с расстоянием между диагонально расположенными двигателями примерно 450мм. Рама состоит из двух текстолитовых площадок и четырёх пластиковых лучей, присоединяемых к площадкам.
На Алиэкспрессе мне на глаза очень удачно попался готовый набор для сборки квадрокоптера, который я сразу же заказал! Цена набора в районе 80$! Если покупать тот же набор запчастей по-отдельности, в такую низкую цену вы точно не впишитесь! Набор правда не совсем полный, но недостающие вещи более-менее понятны и доступны к отдельному заказу.
Набор состоит из следующих компонентов:
Рама
Центральные площадки, лучи рамы, соединительные винты для их сборки в общую конструкцию. Название рамы скрывает в себе свой размер. А именно: между осями двух диагональных расположенных двигателей ровно 450 милиметров! Это хорошо видно на чертеже, который кстати уже является редкостью: на сайте-источнике, где я брал этот чертёж, он уже отсутствует!
Нижняя площадка рамы имеет дорожки, как на печатной плате, предназначенные для разводки силовых проводов питания всего механизма.
Полётный Контроллер
Мозговой центр квадрокоптера — это Котроллер полёта с маркировкой APM2.6. Собран на базе Arduino Mega, программируется через USB, содержит в себе гироскопы, акселерометры и барометр.
Датчик GPS

Датчик для ардуино GPS с маркировкой 6M. Также содержит в себе компас. Необходим для корректировки полёта.
Регуляторы оборотов

Специальное устройство, плавно регулирующих подачу электрического тока на двигатели, в зависимости от команд поступающих от мозгового центра летательного аппарата — полётного контроллера. А в прочем не совсем так. Без таких вот регуляторов оборотов в принципе не возможна работа бесколлекторных двигателей, которые используются в этой авиамодели. Бесколлекторным двигателям необходима последовательная подача напряжения на определённые обмотки двигателя в определённом порядке, этим и занимаются регуляторы оборотов!
БК-Двигатели

4 электрических бесколлекторных двигателя. Что про них ещё скажешь?
Бесщёточные. Маркировка 2212 1000KV, что означает что этот мотор способен выдать скорость вращения 1000 оборотов в минуту на каждый вольт полученного напряжения. Модели собранные на двигателях с высоким KV (более 2000) летают очень быстро, а с малым (менее 1000) — напротив медленно, зато долго!
Пропеллеры

4 винта. 2 с загибом для вращения по часовой стрелки, ещё 2 против.
Остальное
Термоусадочные трубки, винтики и прочая мелочь. Среди этого можно отдельно пожалуй выделить штекеры для подключения двигателей. Их использование позволяет делать двигатели легко отсоединяемыми от регуляторов. Это упрощает замену двигателя в случае поломки, а также позволяет быстро поменять полярность неправильно подсоединённому двигателю. Хотя многие владельцы квадрокоптеров предпочитают не пользоваться этими штекерами, а припаивать всё намертво.
Недостающие компоненты
Аппаратура управления
Попросту говоря просто пульт управления авиамоделью и его приёмник
Батарея
Мощный тяжелый аккумулятор, как правило состоящий из нескольких ячеек (2s-6s). Для многоячеистых батарей желательно также иметь специальное зарядное устройство.
Дополнительное оборудование
Телеметрия, камеры, тестеры, системы FPV, другое навесное оборудование пока рассматривать не буду, так как оно не является необходимым для нашего первого полёта.
Оставьте комментарий Отменить ответ
Для отправки комментария вам необходимо авторизоваться.
Разделы
- (7)
- Законодательство (2)
- Наши проекты (69)
- 3D печать (3)
- Домашнее хозяйство (12)
- Дроны (25)
- Микроконтроллеры (23)
- Модели, игрушки (18)
- Технологии (18)
- Умный дом (13)
- Электроника (39)
- Обзоры товаров (11)
Войти
Свежие записи
- Зарядка пилота )
- Простая замена балансировочного разъёма литиевого аккумулятора
- Кофр для коптера из монтажной пены
- Бесперебойник для WiFi-роутера
- Трёхдолларовый павербанк из фикс-прайса
Свежие комментарии
- 1 к записи Паяльная станция на Arduino простым языком
- Aleksandr к записи Паяльная станция на Arduino простым языком
- Люстра в спальню. Почти готово. — СделайСам — Витебск к записи Люстра в спальню. Что может быть проще?
- Люстра в спальню. Почти готово, остались сущие пустяки. — СделайСам — Витебск к записи Люстра в спальню. Когда инженеру заняться нечем.
- Люстра в спальню. Когда инженеру заняться нечем. — СделайСам — Витебск к записи Люстра в спальню. Что может быть проще?
Страницы сайта…
- Авторы
- Наши партнёры
- О сайте
- Статистика сайта
- Города и регионы
- О Витебске
- Витебский бизнес-справочник
- Город-212
Источник: diy-vitebsk.ru