
Все началось в прошлом году где то в мае. Но тогда было слышно, что червячный механизм проскальзывает из-за выработки втулок. Я заказал эти втулки PCMF101209E old.autopiter.ru/goods/PCMF101209E, PCMF101212E old.autopiter.ru/goods/PCMF101212E и поменял их. Но этого хватило на 4000км и потом все по новой. ОШИБКА АКТУАТОРА. (На тот момент я и не подозревал, что можно было поменять смазку на правильную и как я сейчас думаю все могло бы работать, но это предположение и пока проверить нету возможности из за отсутствия актуатора который бы не был переделанным).
После чего мне мой друг купил актуатор с алиэкспресса за 15000 руб (30.06.2020г). На тот момент я не знал, что это китайский актуатор. Он точ в точ как оригинал выглядит, но смазка в нем была как я помню не синего цвета была. Установил я его сам. Проехал на нем 35км и опять ошибка.
После этого я его разобрал и убедился что сделан он как оригинал на мой взгляд. Пробовал я ставить на этот алиэкспресовский старый моторчик со старого актуатора но ничего не помогало. Пробовал мерить ток моторчика программой течстрим (снизу статьи прикреплю фотографии). После этого я нашел на сайте DRIVE2.ru пользователя serg1386 он переделывает актуаторы со втулок на подшипники.
Испытание линейного привода
Списался с ним и отправил ему этот алиэкспресовский актуатор на переделку в Минск. Сергей переделал и прислал сдэком обратно. Поставил обратно на машину. Сделал инициализацию течстримом и стал ездить. Проехал где-то 1700км и опять появилась ошибка.
Написал Сергею и он мне написал, что проблема в смазке (объяснил, что он рассчитывал, что та смазка которой он смазал будет работать но смазка не стала работать так как хотелось) и предложил бесплатно отправить к нему и он поменяет смазку на правельную и пришлет мне обратно. Договорились на том, что я отправлю еще оригинальный актуатор который у меня еще был и он его переделает за пол стоимости и переделанный актуатор на пересмазку бесплатно. Так я и сделал отправил два актуатора. Когда эти актуаторы ко мне пришли обратно, то я поставил алиэкспресовский у уже проехал 1600км и пока все работает. Буду время от времени писать сколько проехал километров и скидывать токи актуатора.
ток моторчика актуатора новый 1.8А старый 2.4А (последнее измерение2.8А) моторчик из белорусии 2.2А
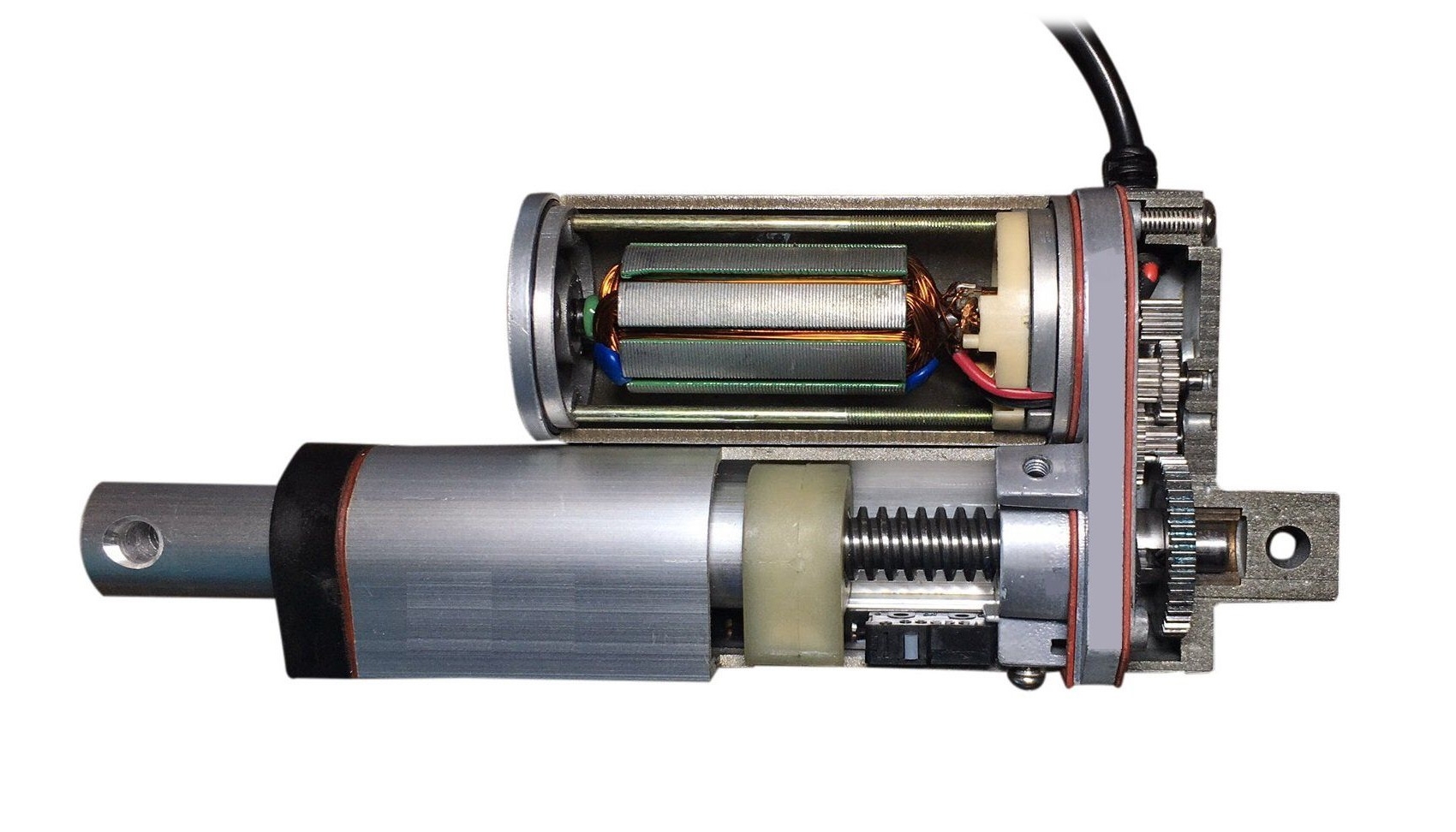
Фото актуатора Алиэкспресс




Линейный привод из Китая. Тест актуатора для теплицы с Алиэкспресс. Linear Actuator Test

Фото переделанного актуатора Алиэкспресс


Вот график актуатора Алиэкспресс переделанного. Проехал 23км 080321

Полный размер
Ездию на Алиэкспресовском переделанном актуаторе:
Проехал 23км 08.03.21 9.280км 23.08.21 ошибка актуатора (заглушил авто, подождал пока перестанет мигать шестеренка, завел и поехал. Такие ошибки были и на оригинальном актуаторе. После ошибка не появлялась.)
Проехал 10.000км 30.08.21 10.250км 05.09.21 Появилась ошибка актуатора. Заглушил авто, подождал пока погаснет шестеренка и поехал дальше. Через пару дней сделал инициализацию.
Проехал 12.000км 30.09.21 Пока все прекрасно.
Проехал 13.800км 19.10.21 Появилась ошибка и настраиваться актуатор отказался (отказывался настраиваться из-за нагрева (видимо смазка исчерпала свои свойства), можно было и подождать мин 30 и поехать дальше на этом моторчике но не было времени ждать и я поменял актуатор на переделанный serg1386 с новым моторчиком) так как на работу опаздывать мне не хотелось.
Проехал (ориг. бу переделанный) 4793км (общий пробег 148427км)22.12.21 Появилась ошибка актуатора. Сделал инициализацию и поехал дальше. Ошибка может появилась из-за -23 градусов на улице но сомневаюсь что из-за этого. Буду ждать когда появится следующая ошибка. (проехал еще буквально 19км и появилась опять ошибка).
Поставил 22.12.21 алиэкспресовский со своей смазкой. Проехал 3422км 06.05.22
Поставил 06.05.22 оригинальный бу со своей смазкой. Проехал 10500км 12.10.22
Поставил 12.10.22 оригинальный новый. Проехал 4500км 15.12.22
Источник: www.drive2.ru
Линейные актуаторы: руководство по использованию





Линейные актуаторы предназначены для совершения линейно поступательных движений: поднимать и опускать, открывать и закрывать, толкать и втягивать, извлекать и вставлять. Например линейный привод сможет открывать/закрывать гаражные ворота, управлять окнами и дверьми в умном доме или же поднимать и опускать багажник вашего DIY-авто.
Список моделей
| XDHA12-50 | 12 В | 50 мм | 900 Н | 10 мм/с | 20% |
| XDHA12-100 | 12 В | 100 мм | 900 Н | 10 мм/с | 20% |
| XDHA12-200 | 12 В | 200 мм | 900 Н | 10 мм/с | 20% |
| XDHA12-300 | 12 В | 300 мм | 900 Н | 10 мм/с | 20% |
| XDHA12-500 | 12 В | 500 мм | 900 Н | 10 мм/с | 20% |

Общие сведения
Линейный актуатор (привод) – это устройство, которое преобразует электрическую энергию в линейное перемещение выходного штока.
Актуатор состоит из двигателя, редуктора и механического винтового привода с выходным штоком. При подаче питания → вращается вал двигателя → вращается редуктор → вращается ходовой винт → поступает линейное перемещение штока. При смены полярности — шток начнет перемещается в противоположную сторону. При снятии питания — процесс останавливается.
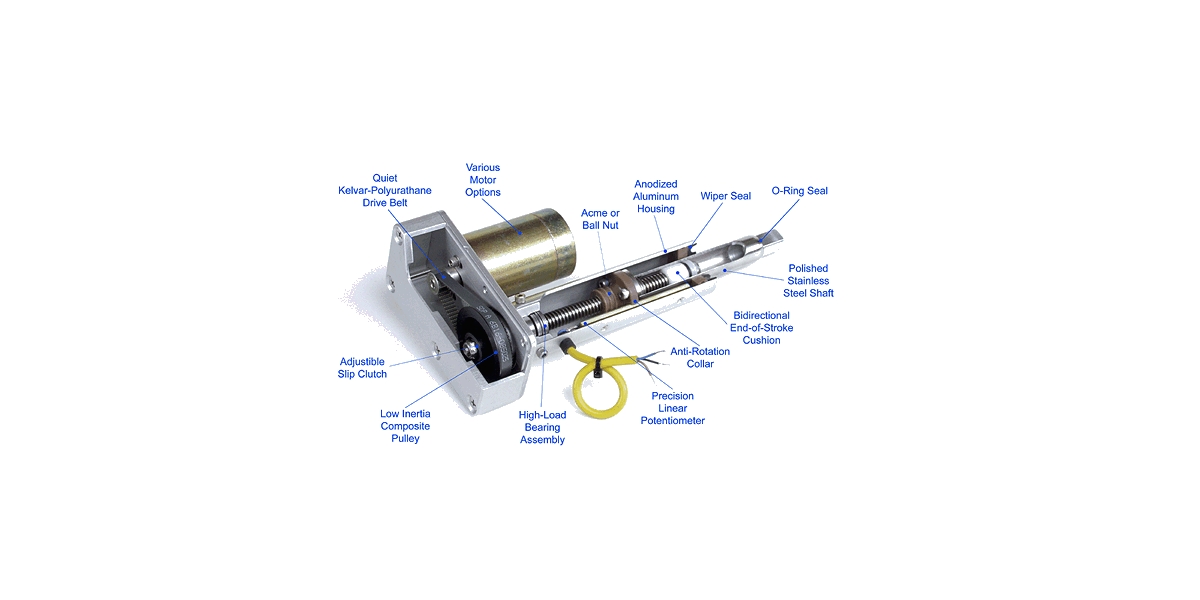
Конструкция актуатора
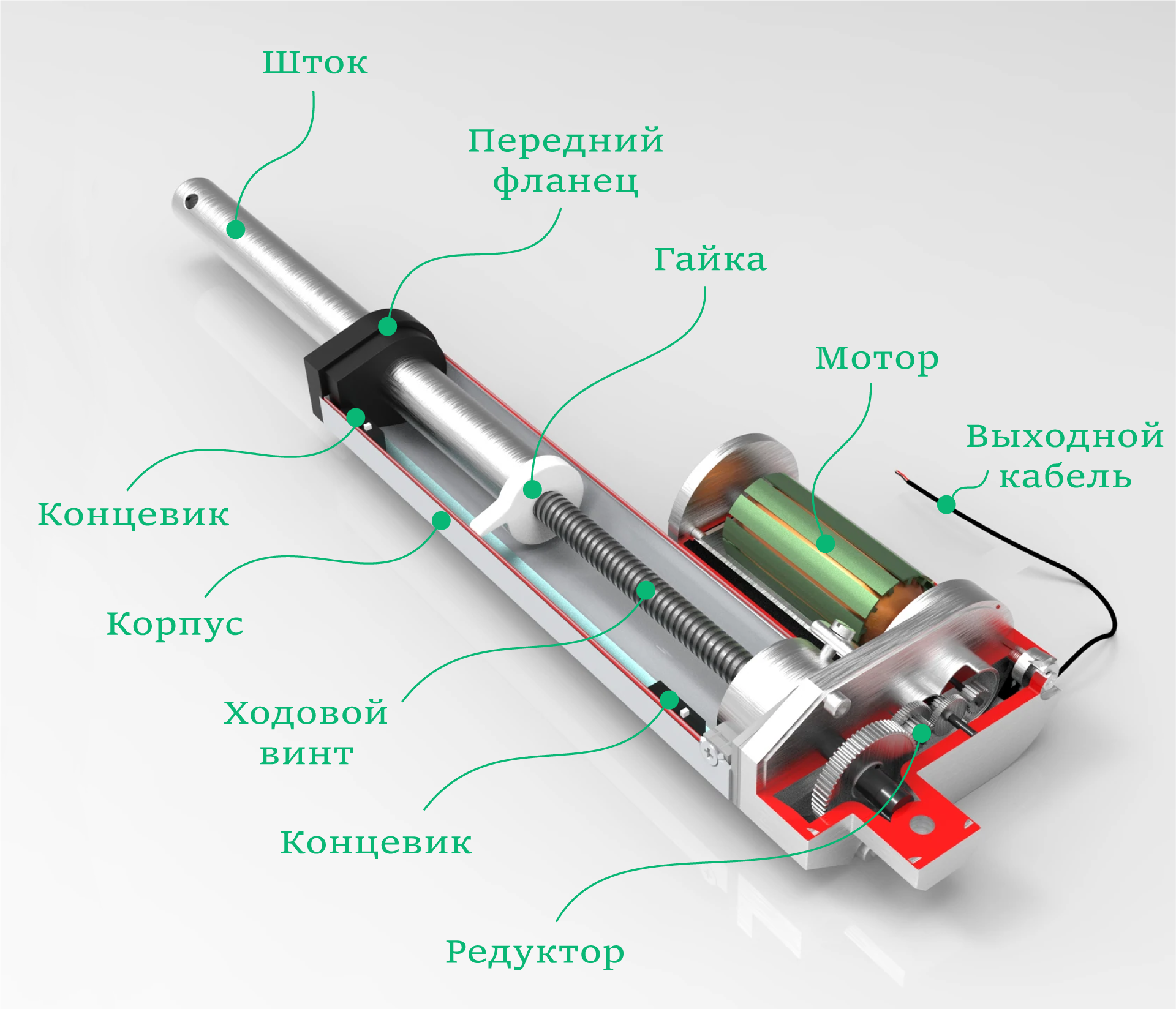
Мотор
Мотор (двигатель) — устройство для преобразования электрической энергии в механическую. При подключении питания выходной вал двигателя начинает вращаться в одну сторону, при смене полярности — выходной вал двигателя меняет направления вращения в противоположную сторону.
Редуктор
Выходной вал мотора соединён с группой металлических шестеренок, которые пропорционально позволяют увеличить крутящий момент, но при этом снизить скорость вращения вала. В итоге, чем больше передаточное число, тем больше крутящий момент и соответственно меньше скорость вращения выходного вала из редуктора. Всё аналогично коробке передач в автомобиле.
Механический привод
Продолжением вала редуктора является механический привод, который выполнен по конструкции винт-гайка или правильнее сказать винтовая передача, где гайка установлена на винтовую направляющую ось и неподвижно соединена со штоком. При работе двигателя, гайка перемещается по резьбе вдоль всего винта, соответственно перемещая шток актуатора.
Шток
Шток — выходная часть линейного актуатора. Шток выдвигается или втягивается, перемещаясь по направляющей. Направление перемещения задается направлением вращения двигателя.
Концевики
Для автоматической остановки штока в конечных положениях, в корпусе актуатора расположено два концевых выключателя: один датчик установлен для фиксации крайнее выдвинутого положения, а второй — для крайнее втянутого положения.
При достижении крайних положений, датчик срабатывает и питание двигателя выключается. Дальнейшее движение возможно только в противоположном направлении, т.е. при смене полярности питания для реверса двигателя.
Выходной кабель
На выходе актуатора расположен кабель с двумя проводами для подключения линейного привода к питанию или коммутирующему устройству. При подаче питания поступает линейное перемещение штока. При смены полярности — шток начнет перемещается в противоположную сторону. При снятии питания — процесс останавливается.
Корпус
Все конструктивные компоненты линейного привода изготовлены из алюминия, что обеспечивает легкость и прочность устройства. Линейные актуаторы соответствуют степени защиты IP54, что гарантирует работу в пыльной среде и допускает попадания воды. А это позволяет использовать модули не только в домашних, но и уличных условиях.
Характеристики актуатора
Актуаторы отличаются между собой длиной штока, осевым усилием, скоростью перемещения штока, рабочим циклом и напряжением. Характеристики на конкретно ваш привод, ищите в описании товара на интересующую модель устройства. А мы пока рассмотрим подробнее что это за данные и на что они влияют.
Длина штока
Длина штока — это расстояние на которое шток может выдвинутся относительно корпуса устройства. Самые ходовые модели с длиной штока от 50 до 500 мм.
Осевое усилие и скорость штока
- Осевое усилие — это максимальная нагрузка в ньютонах, которую шток актуатора способен перемещать.
- Скорость штока — это средняя скорость, с которой шток совершает линейное перемещение.
Осевое усилие и скорость движения штока взаимосвязаны между собой с помощью редуктора. Редуктор при неизменной мощности двигателя изменяет соотношение скорости его вращения и крутящего момента, что в итоге влияет на конечную скорость линейного перемещения и усилие на штоке актуатора. Чем больше передаточное отношение редуктора, тем больше усилие и меньше скорость.
Рабочий цикл
Рабочий цикл актуатора (коэффициент нагрузки) — это доля времени в процентах безостановочной работы актуатора от общей продолжительности полного цикла. Например, показатель рабочего цикла равный 10% означает, что актуатор способен непрерывно работать в течение 1 минуты из каждых 10 минут. Средний статистический рабочий цикл актуаторов варьируется от 10 до 25%.
Питание
Для штатного режима работы актуатора необходим источник питания напряжением 12 вольт с током не менее 2,5 А.
Примеры работы
Рассмотрим несколько примеров работы с линейными актуаторами.
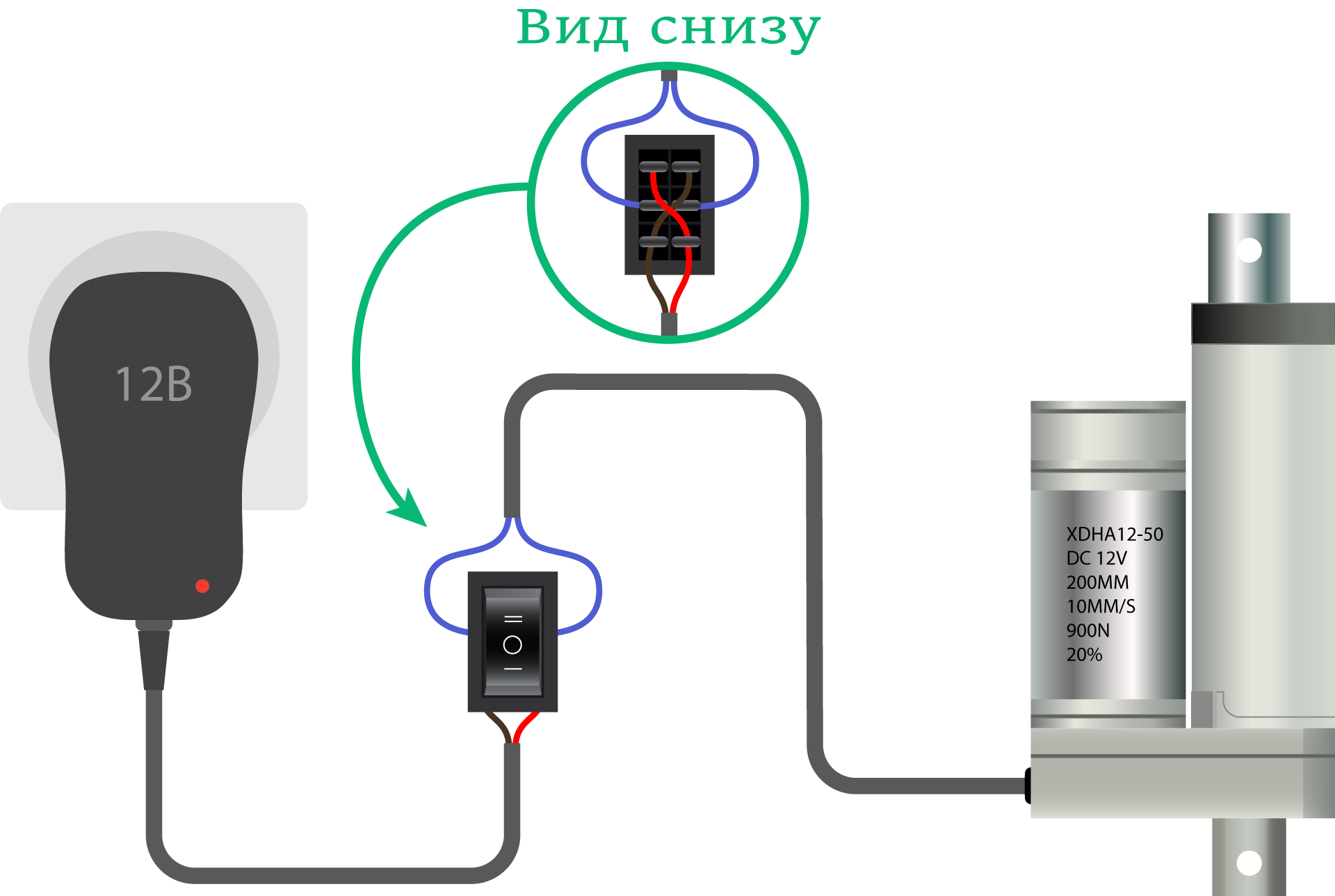
Простой пульт
Работать с актуатором можно даже без микроконтроллера. Соберём простую схему, где трёхпозиционный тумблер сможет рулить линейным приводом.
Что понадобится
- 1× Линейный актуатор XDHA12-50 ( 900 Н / 12 В / 50 мм)
- 1× Источник питания на 12 В
- 1× Трёхпозиционный переключатель (ON-OFF-ON)
Т.к. переключатель будет коммутировать силовые линии питания, то соответственно должен быть рассчитан на максимальный ток работы линейного привода, в нашем случае 2,5 А.
Схема устройства
Результат работы
В зависимости от положения переключателя актуатор совершает разные действия:
- В режиме ON1 → шток совершает линейное перемещение вперед.
- В режиме OFF → шток стоит на месте.
- В режиме ON2 → шток совершает линейное перемещение назад.
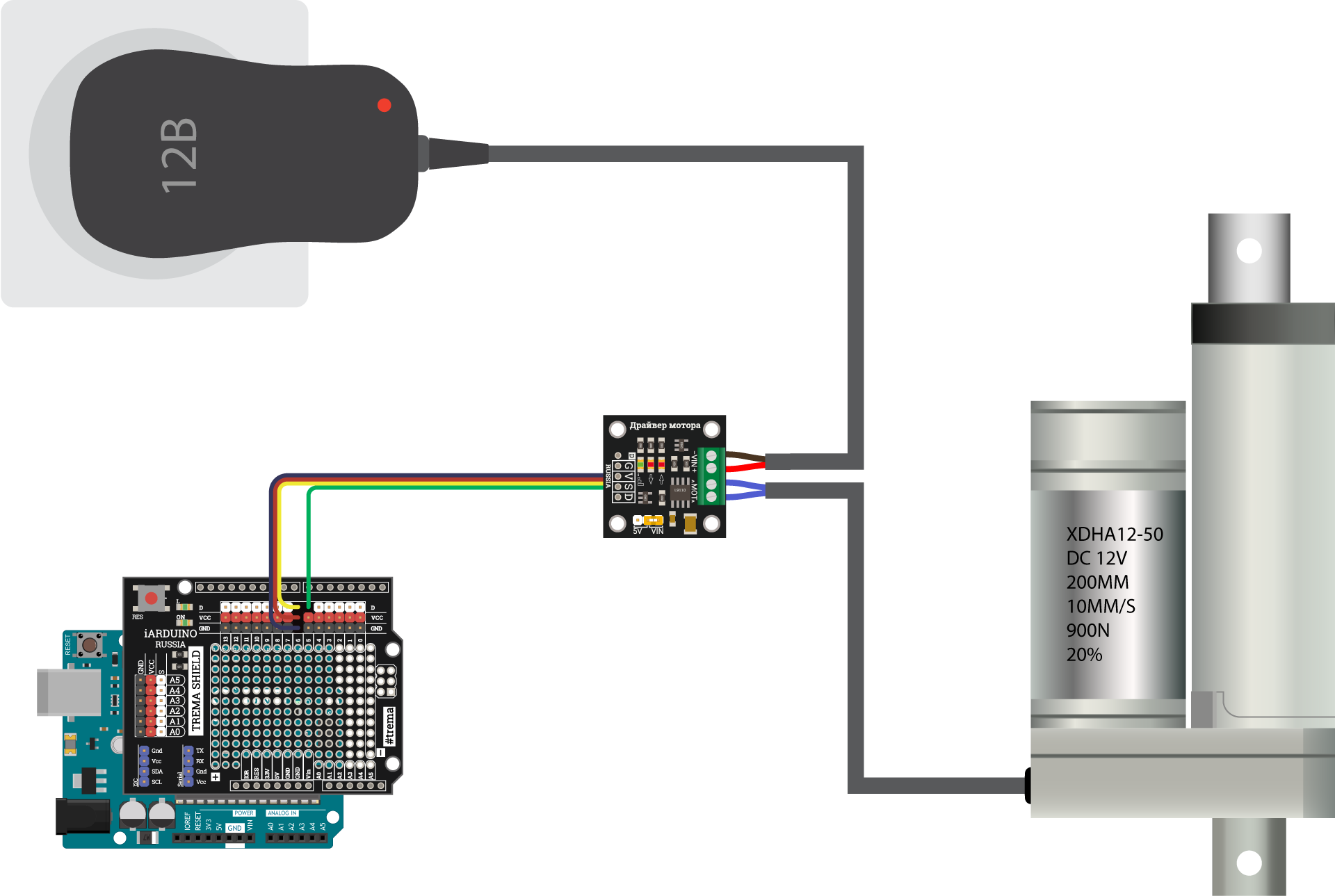
Автоматика на Arduino с драйвером мотора
Автоматизируем процесс, заставим линейный привод совершать движения по заданному алгоритму. На роль контроллера для работы с актуатором рассмотрим платформу Arduino Uno, а на роль коммутатора — драйвер мотора.
Что понадобится
- 1× Линейный актуатор XDHA12-50 ( 900 Н / 12 В / 50 мм)
- 1× Источник питания на 12 В
- 1× Arduino Uno
- 1× Trema Shield
- 1× Драйвер мотора (Trema-модуль)
- 1× Кабель USB (A — B)
Схема устройства
Программная настройка
Исходный код
// Назначаем пины драйвера мотора constexpr auto PIN_DRIVER_DIR = 5; constexpr auto PIN_DRIVER_SPEED = 6; void setup() < // Назначаем пины управления мотором в режим выхода pinMode(PIN_DRIVER_DIR, OUTPUT); pinMode(PIN_DRIVER_SPEED, OUTPUT); >void loop() < // Совершаем линейное перемещение штока актуатора вверх // При достижении максимума сработает концевик в актуаторе // и автоматика внутри актуатора отключит мотор самостоятельно digitalWrite(PIN_DRIVER_DIR, HIGH); digitalWrite(PIN_DRIVER_SPEED, HIGH); delay(7000); // Совершаем линейное перемещение штока актуатора вниз // При достижении минимума сработает концевик в актуаторе // и автоматика внутри актуатора отключит мотор самостоятельно digitalWrite(PIN_DRIVER_DIR, LOW); digitalWrite(PIN_DRIVER_SPEED, HIGH); delay(7000); >
Результат работы
После прошивки Arduino, шток линейного привода каждые 7 секунд буде перемещаться вверх или вниз.
Габаритный чертёж
Размеры линейных актуаторов отличаются между собой. Габариты на конкретно ваш модуль, читайте в описании товара на интересующую модель устройства.
Ресурсы
- Линейные приводы в магазине:
- Линейный актуатор XDHA12-50 ( 900 Н / 12 В / 50 мм)
- Линейный актуатор XDHA12-100 ( 900 Н / 12 В / 100 мм)
- Линейный актуатор XDHA12-200 ( 900 Н / 12 В / 200 мм)
- Линейный актуатор XDHA12-300 ( 900 Н / 12 В / 300 мм)
- Линейный актуатор XDHA12-500 ( 900 Н / 12 В / 500 мм)
Источник: wiki.iarduino.ru
Линейный актуатор для Arduino: мехатроника для ваших проектов

Мехатроника — это дисциплина, в которой механика сочетается с электроникой, являясь междисциплинарной отраслью инженерии, которая опирается на робототехнику, электронику, вычисления, телекоммуникации, управление и т. Д. Чтобы выйти за рамки электронных DIY-проектов и начать экспериментировать с мехатронными проектами, вы можете начать интегрировать такие устройства, как двигатели o el линейный привод для вашего Arduino.
Это открывает вам новый мир возможностей для производителей. Фактически, этот линейный актуатор является наиболее практичным, поскольку он может выполнять подвижные действия или воздействовать на другие элементы. Вы хотите знать больше? Мы вам скажем .
- 1 Типы прямоходных приводов
- 2 Об электронном поступательном приводе
- 2.1 Управление линейным приводом
- 2.2 Распиновка
- 2.3 Где купить прямоходный привод?
Типы прямоходных приводов

Существует несколько типов приводов, хотя в этой статье мы сосредоточимся на том, в котором для привода плунжера используется электродвигатель. Но следует знать, что могут быть и другие виды:
- Гидравлика: Они используют какой-то тип жидкости для перемещения поршня. Примером может служить то, что многие сельскохозяйственные машины или экскаваторы используют эти поршни и давление масла для перемещения шарнирных рычагов, гидравлических прессов и т. Д.
- электрический: это приводы, которые используют бесконечный винт, вращаемый электродвигателем, для создания движения. Есть также соленоидный тип (электромагнит), который использует магнитное поле для перемещения поршня или плунжера и пружину, чтобы вернуть его в исходное положение, когда это поле не действует. Практическим примером может быть последний пример, который я представляю в этой статье, а также многие другие примеры робототехники, обычных механических устройств и т. Д.
- Шины: в качестве жидкости используется воздух, а не жидкость, как в случае гидравлики. Примером этого являются типичные линейные приводы, которые можно найти в технологических мастерских некоторых учебных центров.
Конечная цель этого устройства — преобразовать энергию в этом случае гидравлический, электрический или пневматический с линейной тягой, создавая таким образом силу, тягу, действуя как регулятор, приводя в действие какой-либо другой механизм и т. д.
Об электронном поступательном приводе
В основном электрический линейный привод это не более чем электродвигатель, иногда может быть NEMA как уже было видно. Этот двигатель вращает свой вал, и с помощью комбинации шестерен или зубчатых цепей он вращает бесконечный винт. Этот бесконечный винт будет отвечать за скольжение поршня или штока в том или ином направлении (в зависимости от направления вращения).
Что поршень это будет тот, который служит приводом, чтобы что-то толкать, что-то тянуть, прикладывать силу и т. д. Сферы применения достаточно широки. Как видите, это довольно простая вещь, в которой не так уж много загадок.
Эти линейные приводы, в отличие от других нелинейных, имеют то преимущество, что они могут большие силы и перемещения значительные (в зависимости от модели). Но для Arduino у вас есть модели, которые могут работать от 20 до 150 кгс (килограмм-сила или килопонд) и смещения от 100 до 180 мм.
Большим недостатком является то, что скорость перемещенияПоскольку при приложении этих огромных усилий редукционные колеса, необходимые для увеличения крутящего момента, будут вызывать снижение скорости выдвижения и втягивания. Для типичных моделей скорость может составлять от 4 до 20 мм / с. Это означает, что для завершения всего линейного процесса он может занять от нескольких десятков секунд до нескольких минут, если он будет дольше и медленнее .
Что касается его вскармливание, у вас они разного напряжения или напряжения. Например, обычно они на 12 или 24 В, хотя вы можете найти их ниже и выше. Что касается их потребления, в некоторых случаях они могут составлять от 2А до 5А. Как видите, двигатель мощный, расход высокий . Так что если вы планируете его кормить с батареями, необходимо учитывать, что у них есть необходимая мощность.
Управление линейным приводом
Электрический линейный привод, который вы можете найти для Arduino, может иметь различные типы управления:
- С потенциометром: с помощью потенциометра они позволяют выбрать положение поршня.
- С окончанием карьеры: концевой выключатель на каждом конце заставит его остановиться самостоятельно, когда он достигнет вершины.
- Вне контроля: у них нет ни одной из вышеперечисленных систем управления.
Распиновка
El цоколевка линейного привода не может быть проще. У него есть два токопроводящих кабеля для питания электромотора, который он объединяет, и не более того. Поэтому никаких сложностей. Единственное, что нужно помнить, выдвигая или втягивая шток, — это то, что двигатель должен вращаться в обратном направлении (полярность тока).
Чтобы это было возможно, вы можете используйте контроллер H-моста как тот, который используется для двигателей постоянного тока. Вы можете подумать, что кто-то вроде него служит вам L298N, В другие видел, например TB6612FNG и тд. Но правда в том, что ни у одного из них нет достаточной мощности для этих линейных приводов (если они большие). Следовательно, перегорел бы контроллер.
Следовательно, вы можете строить только ваш собственный контроль скорости используя транзисторы, такие как BJT или MOSFET, и даже реле твердое состояние .
Где купить прямоходный привод?
El precio линейного привода будет во многом зависеть от размера, скорости, длины, а также силы, которую он может выдержать. Обычно вы можете найти их примерно от 20 до 200 евро. И вы легко найдете их в специализированных магазинах электроники или других интернет-магазинах, таких как Amazon. Например:
- Электромагнитный привод Sourcingmap, способный прикладывать силу 400 г и 4 мм
- Линейный привод Justech DC 12V с ходом до 72 кг и ходом 150 мм
- LHQ-HQ DC 12 В с грузоподъемностью 80 кг и ходом 50 мм
- Seafront 12V до 300 мм и 150 кг поддерживаемого веса (ориентировочно для 50 мм)
- LHQ-HQ 12v до 500 мм и до 500 кг (при 5 мм / с)
Многие из этих продуктов защищены от пыль и брызги по сертификату IPX54. И имейте в виду рекомендации производителя, указанные веса не всегда поддерживаются для всех удлинителей, в некоторых случаях поддерживается только определенный предельный вес вплоть до определенного удлинения.
Интеграция с Arduino
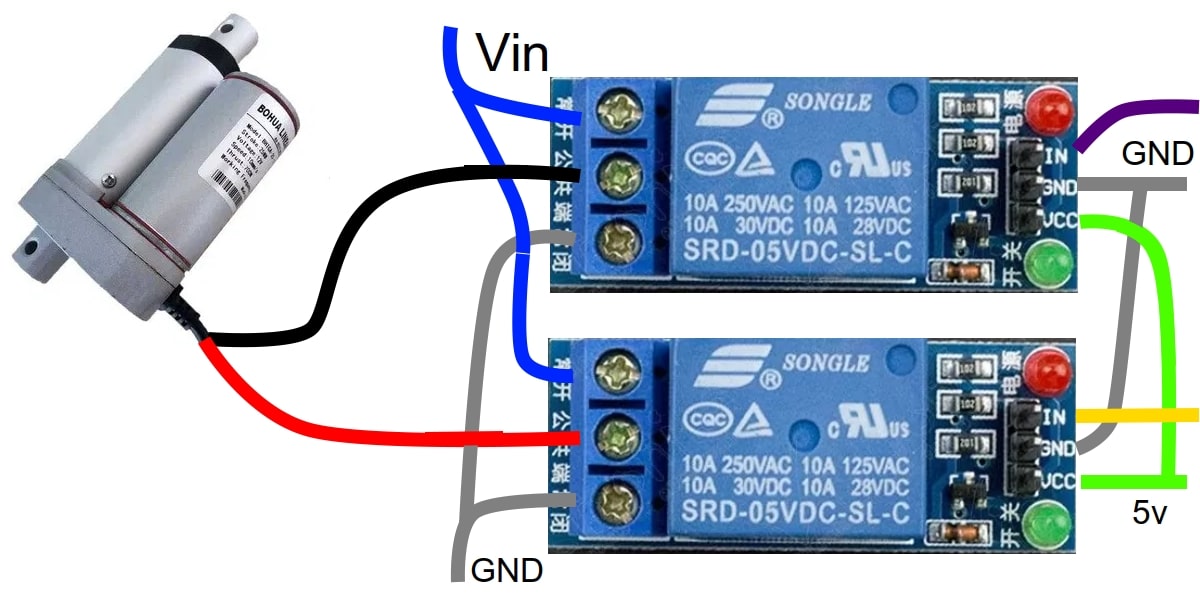
Эти типы приводов могут иметь различное практическое применение, если вы интегрируете их с платой Arduino. Для этого первое, что вы должны знать, — это то, как вы можете сделать схему подключения с вашим значком. Как видите, это совсем несложно, поэтому особых сложностей не вызывает.
Как вы можете видеть из приведенной выше схемы, я использовал два реле и линейный привод. В цветные линии вы видите следующее:
- красный и черный: кабели линейного привода, которые будут идти к каждому из используемых реле.
- Грэй: вы подключили к земле или GND в каждом из реле, как вы можете видеть.
- синий: он идет на Vin питания реле, в этом случае он будет между 5В и 12В.
- Зеленый: линии Vcc модуля подключены к 5 В на вашей плате Arduino.
- Грэй: также земля, подключенная от модуля к Arduino GND.
- Фиолетовый и оранжевый: линии управления, которые будут идти к любому из контактов Arduino для управления вращением. Например, вы можете перейти на D8 и D9.
Что касается примера исходный код для вашей Arduino IDE, эскиз для базового элемента управления будет следующим:
//configurar las salidas digitales const int rele1 = 8; const int rele2 = 9; void setup() < pinMode(rele1, OUTPUT); pinMode(rele2, OUTPUT); //Poner los relés a bajo digitalWrite(rele1, LOW); digitalWrite(rele2, LOW); >void loop() < extendActuator(); delay(2000); retractActuator(); delay(2000); stopActuator(); delay(2000); >//Activar uno de los relés para extender el actuador void extendActuator() < digitalWrite(rele2, LOW); delay(250); digitalWrite(rele1, HIGH); >//Lo inverso a lo anterior para retraer el émbolo void retractActuator() < digitalWrite(rele1, LOW); delay(250); digitalWrite(rele2, HIGH); >//Poner ambos releś apagados parar el actuador void stopActuator()
Вы изменить код чтобы иметь возможность контролировать и позиционировать поршень в определенных положениях, если хотите, или добавить дополнительные элементы .
Содержание статьи соответствует нашим принципам редакционная этика. Чтобы сообщить об ошибке, нажмите здесь.
Полный путь к статье: Бесплатное оборудование » Электронные компоненты » Линейный актуатор для Arduino: мехатроника для ваших проектов
Источник: www.hwlibre.com