
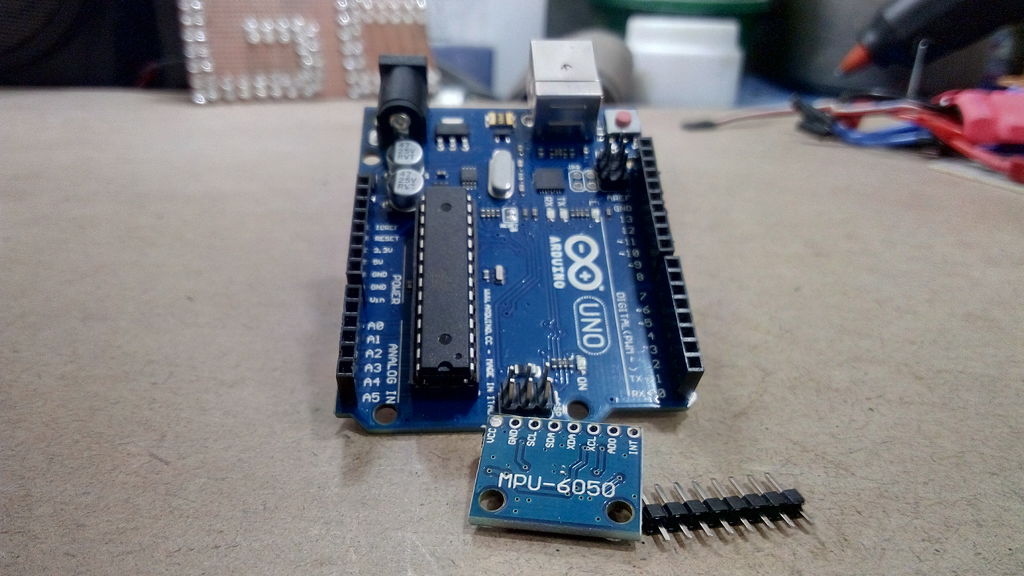
Рама состоит из алюминиевой антенны (штанги), лопасти вентилятора из алюминиевого плафона и дерева. Arduino UNO наряду с MPU6050 (гироскоп + Accle) используется в качестве контроллера полёта.
Шаг 1: Материалы

Показать еще 11 изображений


СОБИРАЕМ СВОЙ КВАДРОКОПТЕР ЗА 10К! (Часть 1) Дрон DIY Aliexpress
Квадрокоптер дальнолет с GPS своими руками ( сборка и ссылки на всю комплектацию)
Это материалы, которые используются для моего дрона. Вы можете использовать любые детали / материалы по вашему усмотрению. Если вы хотите сделать его максимально дешевым, то можете воспользоваться списком материалов ниже.
Ссылки на Амазон:
- Flysky fs-i6x с ресивером X6B
- Батарейка Li-po 11.1v, лучше взять эту
- Зарядник Li-Po
- Arduino UNO
- Гироскоп и акселерометр Mpu6050
- Макетная плата
- Коннетор XT60
- Передатчик и ресивер
- устройство для контроля напряжения Li-Po
Список со ссылками на banggood:
- Передатчик и ресивер
- Бесщеточный двигатель
- 30 Amp ESC
- Li-Po батарейка
- Зарядное устройство Li-Po
- Контроллер напряжения Lipo
- Arduino uno
- MPU6050
- XT60 коннектор
- Пропеллер 1045
Ссылки на gearbest:
- Flysky fs-i6x с ресивером X6B
- Батарейка Li-po 11.1v
- Контроллер напряжения Lipo
- Зарядник Li-Po
- Arduino UNO
- Гироскоп и акселерометр Mpu6050
- Коннетор XT60
- Вентильный двигатель CW
- Вентильный двигатель CCW
- 4*30Amp ESCs
- Пропеллер 1045
- Термоусадочная трубка
Шаг 2: Установка моторов


Когда вы покупаете моторы, крепление мотора и несколько винтов входят в комплект. Крепление алюминиевого мотора с винтами идет с ним. (см. рисунок). Установите его на двигатель, используя винты.
Шаг 3: Делаем раму


Показать еще 3 изображения
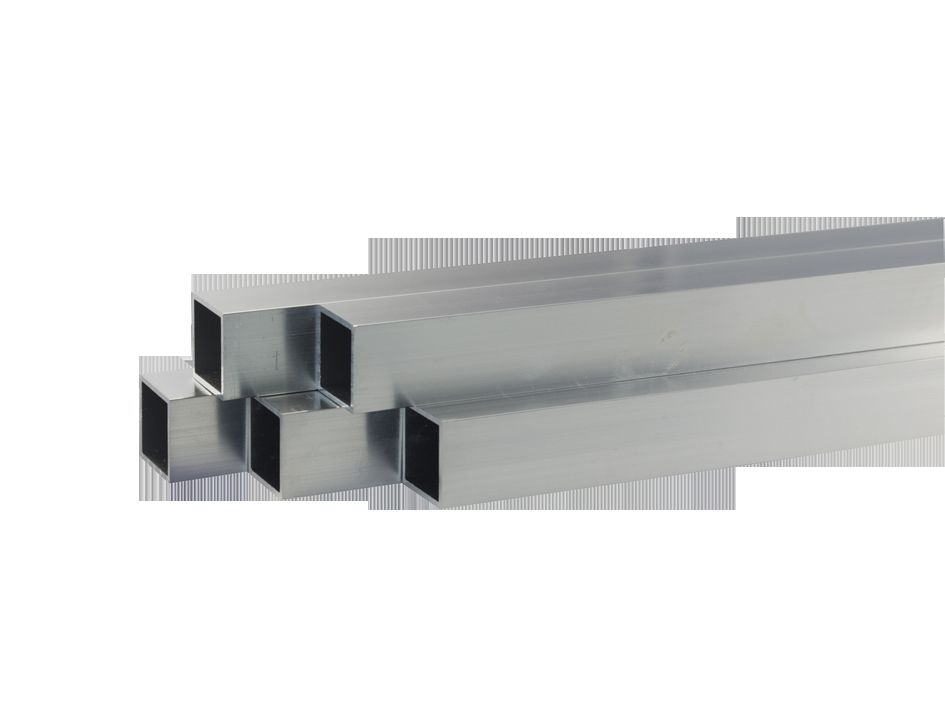
Я использую старую алюминиевую антенну, мягкое дерево и алюминиевую пластину (лопасть вентилятора), чтобы сделать каркас. Отрежьте 4 куска алюминиевого бруска по 20см. Размер центральной пластины составляет около 11 * 18 см…. Деревянное крепление для двигателя имеет длину около 10 см и диаметр 4,5 см (там, где установлен двигатель).
Закрепите алюминиевые стержни с помощью центральной пластины с помощью винтов и вставьте крепление двигателя под алюминиевые стержни. Ваша рама готова (см. видео).
Шаг 4: Устанавливаем все компоненты (ESC и моторы на раму)


Показать еще 4 изображения
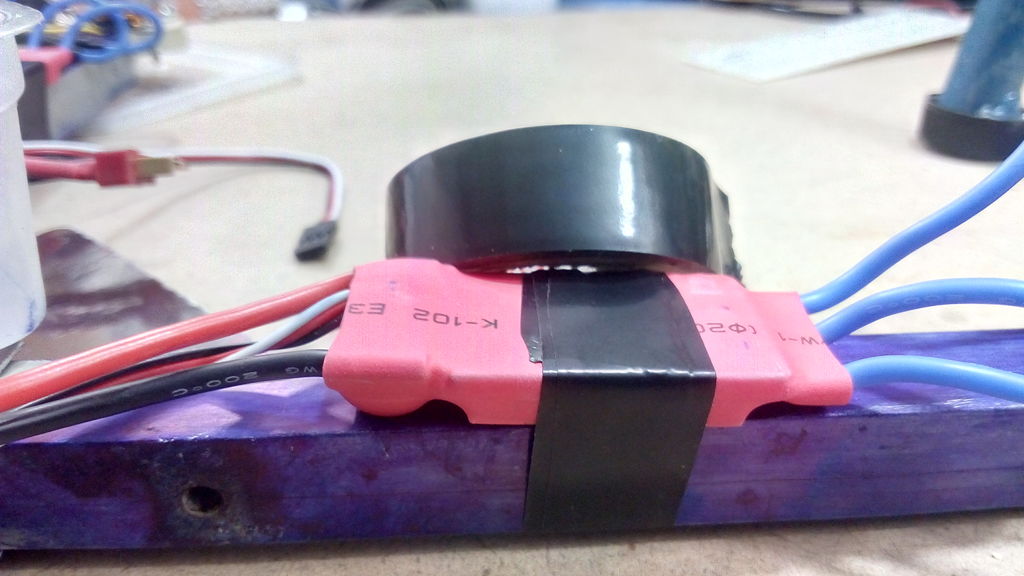
Теперь прикрепите моторы к деревянному креплению с помощью винтов и гаек (любых типов) и соедините с ними провод ESC (произвольно), зафиксируйте ESC с помощью изоленты или стяжек, в моем случае это изолента (дешевле, чем стяжки). После подключения всех моторов и ESC отрежьте провода ESC +ve и –ve и подключите все ESC с помощью проводов или PDB. Я использую провода, потому что в моей раме нет места для ESC. Всё готово.
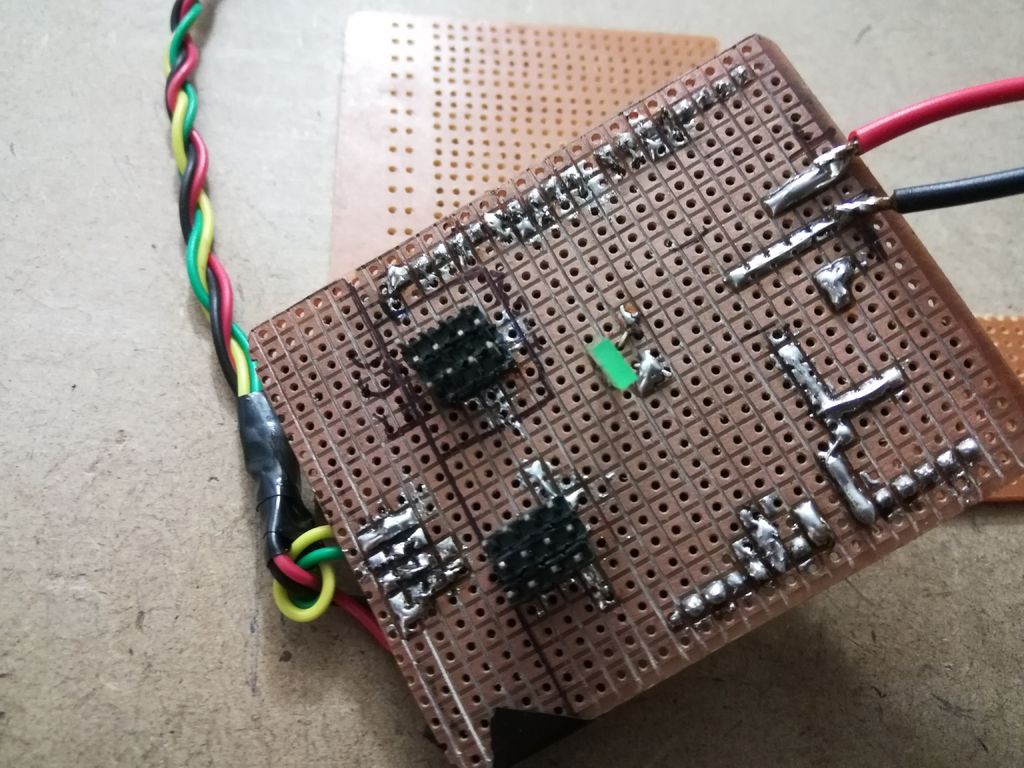
Шаг 5: Контроллер полёта
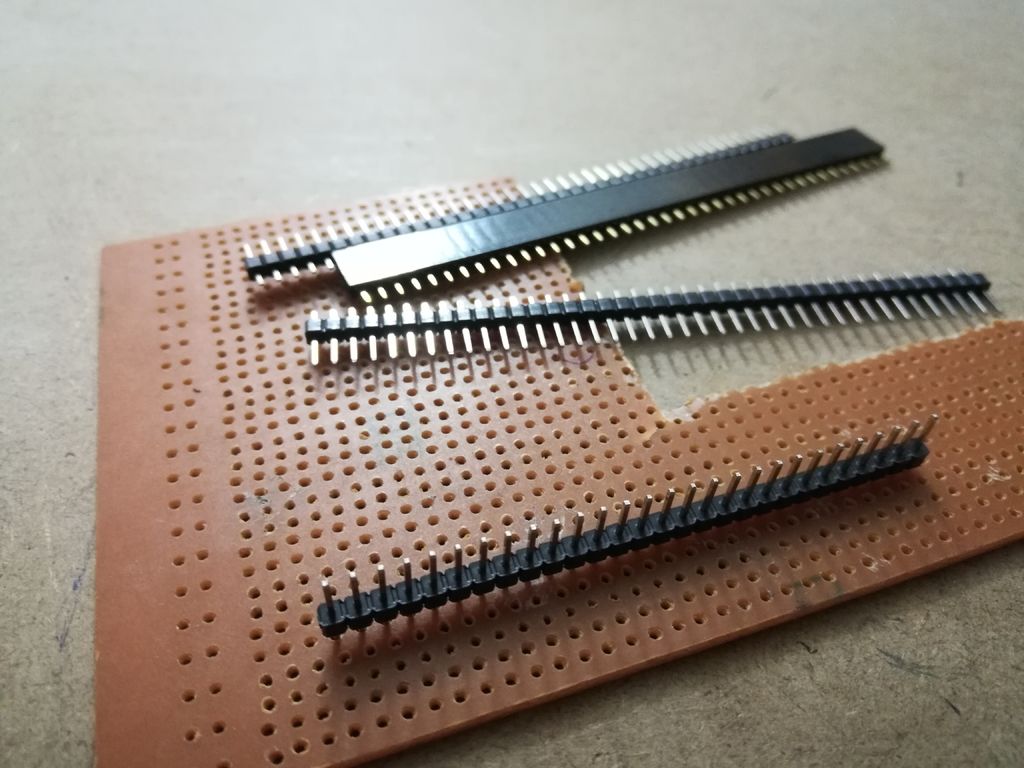
Показать еще 4 изображения
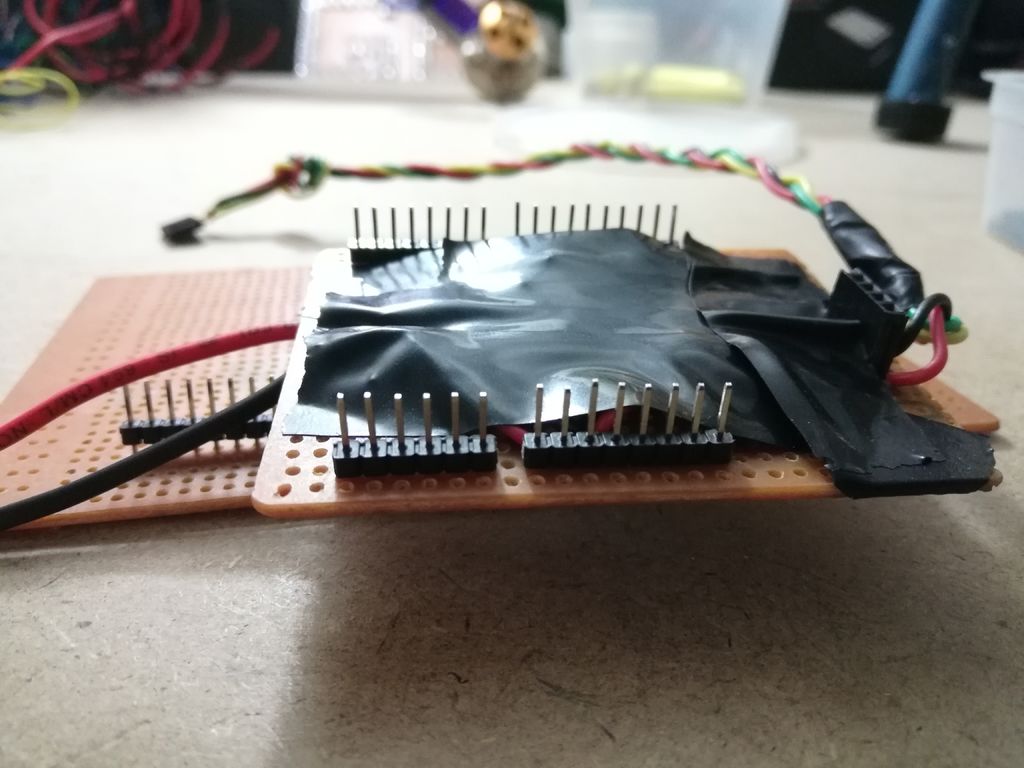
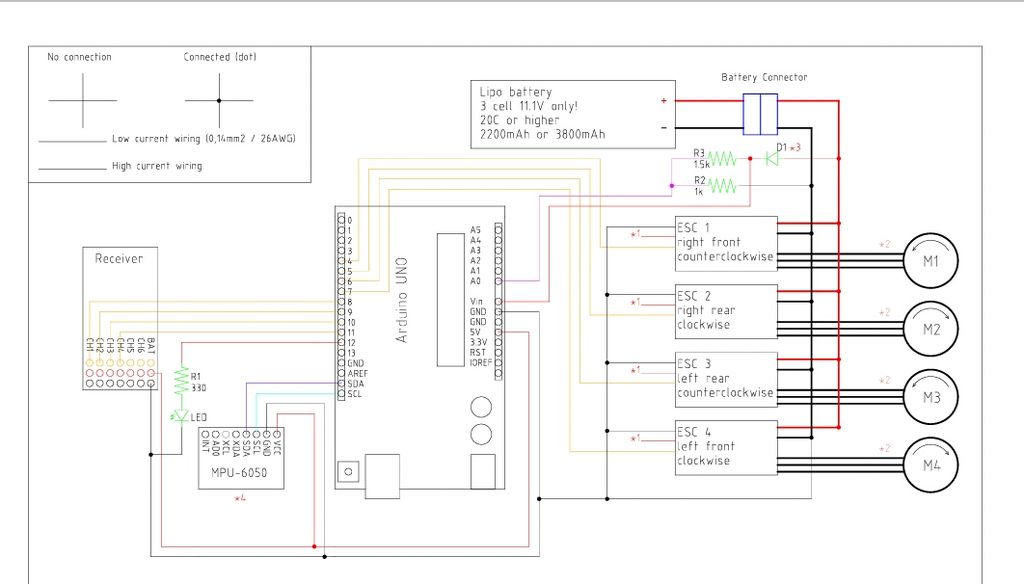
На основе Ардуино Уно и MPU6050, создайте контроллер полёта.
Мой контроллер основан на Joop Brokking’s YMFC-AL и его автоуровневом квадрокоптере. Соедините все согласно диаграмме.
Шаг 6: Соединяем ESC и ресивер с контроллером полёта
*** Не соединяйте BEC-провод ESC (5 вольт), соединяйте лишь сигнальный провод
*** Запитывайте ресивер от 5вольтового источника Ардуино
- Цифровой пин-4 к ESC1 (правый передний CCW)
- Цифровой пин-5 к ESC2 (правый задний CW)
- Цифровой пин-6 к ESC3 (левый задний CCW)
- Цифровой пин-7 к ESC4 (левый передний CW)
- Цифровой пин-8 к каналу 1 ресивера
- Цифровой пин-9 к каналу 2 ресивера
- Цифровой пин-10 к каналу 3 ресивера
- Цифровой пин-11 к каналу 4 ресивера
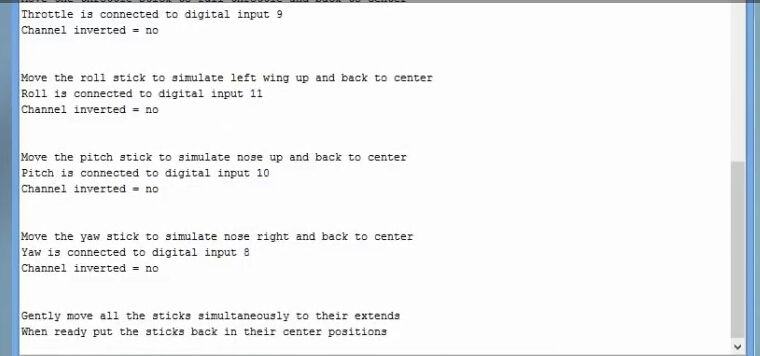
Шаг 7: Настройка контроллера полёта (загрузка скетча)


Показать еще 4 изображения
*** На этом этапе не подключайте лётную батарею
Теперь загрузите Arduino IDE и приложенный скетч и извлеките файл. Вы найдете схемы YMFC-Al, файл Readme, код калибровки ESC, код настройки и код контроллера полета.
Сначала загрузите код и откройте последовательный монитор на 56000b и следуйте инструкциям в видео
Если ошибки не возникло, загрузите скетч калибровки ESC после загрузки кода. Поставьте передатчик на полную мощность и подключите летную батарею после нескольких звуковых сигналов, выключите дроссель (я думаю, что этот метод работает не для всех типов и марок ESC, но у меня это работает отлично).
После загрузки скетча калибровки ESC загрузите скетч контроллера полета и Ваш FC готов.
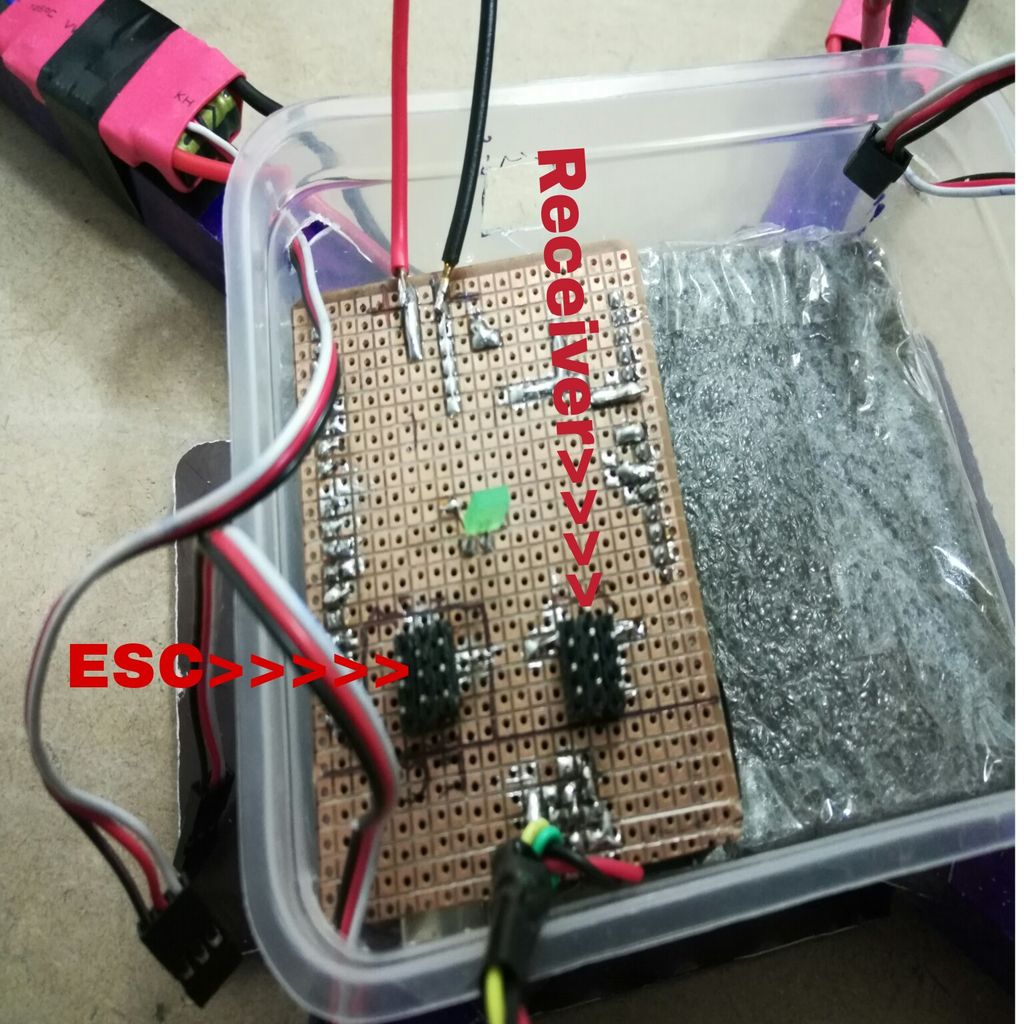
Шаг 8: Установка электроники в кейс и монтаж

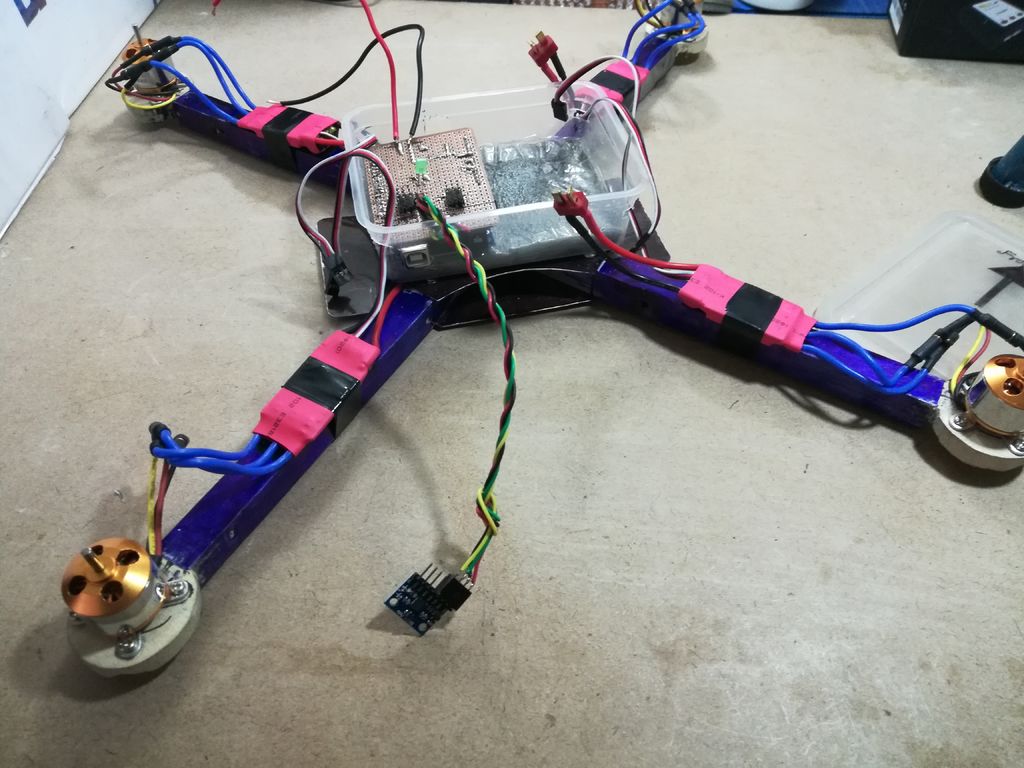
Показать еще 11 изображений



После завершения всех работ по соединению электрокомпонентов, положите всю электронику в коробку и завершите всю проводку. Теперь установите винты CCW на двигатели CCW и винты CW на двигатели CW. Вы готовы к полету.
Самое сложное в создании этого квадрокоптера — настройка PID. Я сломал 2 пары пропеллеров и коробку с электроникой, пытаясь научиться летать на ней.
Игорь Самоделов
Рассказываю как сделать какую-либо вещь с пошаговыми фото и видео инструкциями.
Источник: masterclub.online
Как сделать самодельный квадрокоптер своими руками

Квадрокоптер своими руками — сложная, но вполне осуществимая задача для людей, которые имеют базовые представления о радиотехнике. Существует несколько основных вариантов домашнего конструирования дрона.
Что нужно для сборки квадрокоптера
Набор деталей и расходных материалов может меняться в зависимости от того, какой именно дрон нужно сделать своими руками. Но базовый список элементов выглядит следующим образом:
- рама, на которой будут закреплены все остальные детали;
- четыре специальных двигателя для дрона;
- четыре пропеллера;
- четыре регулятора оборотов для винтов;
- два красных и два черных провода в силиконовой оболочке для моторов;
- силовой разветвитель 3,5 мм;
- литий-ионный аккумулятор — один или несколько;
- плата управления;
- зарядное устройство для батарей питания;
- пульт радиоуправления.
Чтобы собрать квадрокоптер из запчастей, практически все специфические детали можно приобрести в Интернете, например, через сервис Алиэкспресс.
Важно ! Пропеллеры для двигателей лучше брать с запасом, поскольку они быстро выходят из строя.
Чертежи и схемы квадрокоптеров
Чертежи для сборки квадрокоптера могут незначительно различаться между собой. Детали зависят от габаритов собираемого своими руками дрона, от его формы и конструктивных особенностей.
Но базовый чертеж обычно предлагает сделать маленький квадрокоптер на крестообразной силовой раме с размерами 363 на 363 см. Параметры корпуса при этом составляют около 107 на 107 см, в таком случае в дроне без проблем размещаются основные детали.

Структурная схема квадрокоптера выглядит очень просто. В центре конструкции на силовой раме всегда располагается электронная плата управления. По четырем углам на равном расстоянии друг от друга нужно поставить двигатели с закрепленными на них пропеллерами. В корпус в центре конструкции монтируют также элементы питания и радиодатчики для удаленного пилотирования.

Важно! При сборке дрона своими руками нужно следить за тем, чтобы основная масса конструкции приходилась на центр и не смещалась в ту или иную сторону.
Как сделать самодельный квадрокоптер из бумаги
Простейший вариант сборки предлагает выполнить корпус аппарата из плотной бумаги. Такой квадрокоптер своими руками для начинающих будет очень легким, и управлять им в ветреную погоду не получится. Зато и больших расходов он тоже не потребует.
Сборка корпуса из бумаги
Прежде всего, при сборке бумажного дрона необходимо подготовить шаблон. Его можно нарисовать самостоятельно по одному из найденных чертежей, но гораздо проще скачать готовый вариант.

Из готового шаблона острыми ножницами или ножом вырезают отдельные детали. После этого приступают к склеиванию частей — использовать можно ПВА или Момент по желанию. Важный нюанс состоит в том, что клея нужно наносить совсем немного и сразу же убирать его излишки. Даже небольшие застывшие капельки в конечном итоге влияют на массу и балансировку коптера.
Промазанные детали прикладывают друг к другу и слегка прижимают. После этого корпус оставляют сохнуть, а потом визуально проверяют качество сборки.
Установка электронной начинки
Чтобы бумажный дрон взлетел, на него необходимо монтировать электронику. Пошаговая инструкция для квадрокоптера своими руками выглядит так:
- сначала в центральной части рамы снизу устанавливают чипами вверх полетный контроллер с микропроцессором, полевыми транзисторами и сенсорами;
- затем при помощи той же клейкой ленты по углам располагают моторы и подводят к ним провода, закрепив их скотчем во избежание наматывания на винты;
- в центре рамы на двусторонний скотч ставят аккумулятор и соединяют его с моторами.
Готовый квадрокоптер своими руками из подручных материалов можно испытывать при помощи заранее приобретенного пульта управления.

Как сделать мини-дрон своими руками в домашних условиях
Небольшой квадрокоптер можно смастерить своими руками из нескольких покупных деталей, клея и палочек от мороженого-эскимо. На его сборку понадобится потратить около 15 минут времени и минимум усилий.
Сборка силовой рамы дрона
Проще всего использовать для сборки самодельной рамы для квадрокоптера палочки от мороженого. Их склеивают между собой горячим или холодным клеем в виде решетки.

Установка электронной части и моторов
При помощи того же клея в центральной части рамы закрепляют аккумулятор, а по углам ставят четыре двигателя с мини-винтами. Под батареей питания закрепляют электронную плату, отвечающую за прием сигнала с пульта, и соединяют ее со всеми моторами. Чип контроля подключают также к аккумулятору.

Проверка работоспособности
Собранный своими руками бюджетный квадрокоптер устанавливают на ножки, аккуратно прижимают отверткой к поверхности и нажимают на кнопку старта на пульте. Если пропеллеры благополучно закрутятся, дрон сделан успешно и сможет взлететь при проведении первого настоящего испытания.
Внимание! Мини-коптер, выполненный своими руками, не будет поддерживать регулировку оборотов и смену направления движения. Предназначена такая простая модель только для взлета и посадки.
Как сделать квадрокоптер с камерой своими руками
В домашних условиях реально провести сборку не только примитивного дрона, но и профессионального квадрокоптера своими руками. Для этого понадобится приобрести базовые детали — аккумуляторы, контроллер полета, моторы, провода и пульт ДУ. Также нужно купить камеру — компактную и легкую, но с хорошим разрешением.
Сборка рамы
Бумажная и картонная рама для коптера с камерой не подойдет, конструкция будет слишком тяжелой. При желании можно заказать готовую основу для дрона в Интернете. Но очень просто выполнить сборку и своими руками, например, из водопроводных пластиковых труб или легких алюминиевых профилей. Скрепляют детали между собой при помощи винтов или фитингов. На концах лучей рамы снизу можно сразу же прикрутить ножки, на которых будет стоять дрон.

Установка моторов
На каждом из лучей рамы необходимо установить по мощному компактному мотору. Закрепить их можно при помощи термоклея или резьбы. На верхнюю часть двигателей надевают винты. Лопасти для квадрокоптера своими руками обычно не делают — это требует использования фрезеровочного станка. Купить готовые пропеллеры намного проще и практичнее.

Сборка электроники
В центральной части аппарата устанавливают плату управления. Крепить микросхему лучше всего горячим клеем. Двусторонний скотч для массивных конструкций используют реже, поскольку он не обеспечивает надежной сцепки.

Установка камеры
Для сборки летающего дрона своими руками для съемки оптимально использовать GoPro — легкую, небольшую по размерам экшн-камеру. В верхней или нижней части рамы для нее необходимо сделать специальную пенопластовую платформу, которая станет гасить вибрации от корпуса при полете. Камеру для надежности плотно закрепляют резинками.
Установка регуляторов оборотов и подключение проводов
На данном этапе квадрокоптер для видеосъемки своими руками почти готов. Остается только соединить регуляторы оборотов с моторами и контроллером, а потом подключить плату управления к батареям питания. Также нужно не забыть вывести на полетный чип провода от камеры.

Как сделать гоночный квадрокоптер своими руками
Сборка гоночного дрона по сути ничем не отличается от конструирования обычного квадрокоптера. Разница состоит в подходе к выбору деталей — нужно уделить особое внимание моторам, раме и винтам.
В случае с гоночным дроном основу лучше приобретать готовую. Она обеспечит оптимальную балансировку аппарата. Хорошим вариантом для сборки станет легкая и прочная рама из карбона со стандартными четырьмя лучами.
Сборка моторной части
Моторы для гоночного коптера закрепляют на лучах рамы винтами в специальных отверстиях. Двигатели должны быть достаточно мощными — например, хорошо подойдут 2205-2600 KV. В центральной части лучей устанавливают регуляторы оборотов и соединяют проводами с моторами. Винты для сборки гоночного дрона можно выбирать с двумя или тремя лопастями — первые дадут большую скорость, вторые облегчат процесс маневрирования.

Установка электронной части
Стандартным способом на центральной пластине рамы закрепляют плату управления. Ее можно посадить на горячий клей или просверлить отверстия и зафиксировать небольшими винтами. В последнем случае конструкция после сборки получится надежнее. К раме прикрепляют приемник сигнала, который будет передавать команды на плату управления. Аккумулятор традиционно монтируют в нижней части устройства отдельно от микрочипа.

Подсоединение проводов
На финальном этапе сборки остается подключить к плате управления провода, отходящие от камеры и моторов. Сам микрочип при этом соединяют с аккумулятором.

Как сделать квадрокоптер для человека своими руками
Дрон для человека — пока что крайне редкий, небезопасный и дорогостоящий вариант для самостоятельной сборки. Общедоступных инструкций того, как самому в домашних условиях сделать квадрокоптер с огромной подъемной силой, пока не существует, поскольку обладателей таких аппаратов очень немного.
Однако краткий алгоритм создания грузоподъемного дрона можно описать, опираясь на стандартную схему.
Рама
Для сборки самодельного большого квадрокоптера подойдет только металлическая рама из стали, карбона или прочного алюминия. Другие конструкции просто не смогут поднять всю электронику и владельца дрона.

Установка моторов и регуляторов оборотов
Двигатели для мощного квадрокоптера своими руками устанавливаются на лучах силовой рамы. Принципиальное внимание нужно уделить их производительности — суммарная тяга должна быть не меньше 120 кг. Добиться такого показателя реально при помощи восьми бесколлекторных моторов на 3 кВт каждый. К двигателям необходимо докупить регуляторы не менее 80 А. Детали соединяют между собой при сборке проводами, а к раме крепят исключительно на прочных винтах.

ёСборка системы управления
Плата с процессором в квадрокоптере для человека должна поддерживать регулировку оборотов пропеллеров, стабилизацию и смену направления. Ставят ее, как и во всех случаях, на центральной площадке, закрепляя винтами в просверленных отверстиях, и соединяют с моторной частью и приемником сигнала.
Аккумуляторов для коптера понадобится сразу несколько, и они должны обладать максимальной мощностью. Батарее придется питать восемь производительных моторов и к тому же поддерживать дрон в воздухе на протяжении хотя бы десять минут. Чтобы конструкция не получилась слишком громоздкой, при сборке проще связать аккумуляторы в съемный ранец, который сможет надеть на спину владелец.

Посадочные ноги дрону для человека не пригодятся. Но понадобится предусмотреть в конструкции прочный подвес с лямками, который будет отвечать непосредственно за удержание оператора.
Внимание! Построить квадрокоптер для человека довольно дорого. Цена исчисляется десятками тысяч рублей, основные деньги уйдут на покупку моторов и батарей питания.
Заключение
Квадрокоптер своими руками — интересная и увлекательная задача для поклонников радиотехники. При желании в домашних условиях можно изготовить любой дрон, вплоть до моделей, способных поднять над поверхностью земли самого оператора.
Источник: tehnolev.ru
Квадрокоптер (дрон) своими руками из модулей

Беспилотные летательные аппараты (дроны) – это высокотехнологичная дорогостоящая техника. Однако вполне доступными видятся «беспилотники» любительского уровня исполнения. Не случайно последние годы быстро набирают популярность среди обывателей небольшие дроны, в том числе собранные своими руками.
Новая, так называемая технология FPV (First Person View) – вид от первого лица, даёт уникальный опыт полёта каждому желающему. Радиоуправляемый авиамоделизм всегда имел спрос молодёжного социума. Появление дронов лишь подстегнуло этот спрос, легко удовлетворяемый, если купить готовую летающую машину, либо собрать квадрокоптер собственными руками.
- 1 Как собрать дрон-квадрокоптер собственноручно?
- 2 Что потребуется для сборки квадрокоптера (дрона)
- 2.1 Рама квадрокоптера
- 2.2 Двигатели, модули ESC, пропеллеры
- 2.3 Электроника и модуль питания
- 2.4 Готовые решения контроллеров дронов
Как собрать дрон-квадрокоптер собственноручно?
Квадрокоптер (дрон) — конструктивное исполнение беспилотного летательного аппарата, принадлежащего к числу наиболее популярных проектов авиамоделизма. Самый простой способ обзавестись БПЛА – просто взять и купить квадрокоптер (дрон), благо рынок (включая сеть Интернет) свободно предоставляет такую возможность.
Однако для большего интереса и с целью лучшего понимания – что такое дрон, практичнее и экономичнее собрать квадрокоптер своими руками (DIY – Do It Yourself), к примеру, из набора готовых деталей. Более серьёзный вариант – сборка квадрокоптера (дрона) с нуля – используя минимум готовых компонентов.
Что потребуется для сборки квадрокоптера (дрона)
Прежде чем начинать сборку беспилотника собственноручно, потребуется определиться с компонентами для создания квадрокоптера (дрона). Поэтому рассмотрим список базовых компонентов, составляющих конструкцию классического квадрокоптера (дрона). Если же нет желания заниматься сборкой достаточно сложной конструкции, квадрокоптеры профессионального исполнения доступны в продаже.
Рама квадрокоптера
Раму дрона (квадрокоптера) допускается строить, используя разные материалы:
- металлические,
- пластиковые,
- деревянные.
Если выбор пал на деревянную раму дрона (как самую простую с точки зрения технологии), понадобится деревянная доска толщиной около 2,5-3,0 см., длиной 60-70 см. Доска разрезается таким образом, чтобы получились две планки длиной 60 см и шириной 3 см. Эти две планки — структура будущего квадранта квадрокоптера.
Структура рамы дрона выстраивается простым пересечением двух деревянных планок под фрейм-фактор «X». Полученную раму усиливают прямоугольной деталью – сшивкой, в центральной части. Размер прямоугольника составляет 6 × 15 см, толщина 2 мм. Материал тоже дерево.

Не исключаются другие размеры рамы квадрокоптера (дрона), отличные от заявленных, но не следует забывать о соблюдении пропорций. Соединение частей рамы обычно выполняется гвоздями и клеем.
Вместо дерева допускается применить металл или пластик тех же размеров. Однако способы соединения планок будут уже иными.
Ниже список готовых карбоновых рам квадрокоптеров (дронов), имеющихся в продаже на рынке:
- LHI 220-RX FPV
- Readytosky FPV
- iFlight XL5
- RipaFire F450 4-Axis
- Usmile X style
- Readytosky S500
Двигатели, модули ESC, пропеллеры
Под изготовление классического квадрокоптера (дрона) необходимо иметь 4 двигателя. Соответственно, если задуман проект октокоптера, потребуется уже восемь двигателей. Рекомендуется применять бесщёточные моторы. Этот вид электродвигателей меньше нагружает аккумулятор, что является важным критерием эксплуатации дронов.

На русском языке модуль ESC (Electronic Speed Controllers) квадрокоптера называют – электронный контроллер скорости. Это не менее важная часть беспилотного летательного аппарата, чем электромотор.
Модули ESC отвечают за корректную передачу мощности моторам дрона. Количество модулей квадрокоптера соответствует числу электромоторов. Вот некоторые из рекомендуемых моторов для квадрокоптеров (дронов):
- Emax RS2205 2600KV Brushless Motors
- DLFPV DL2205 2300KV Brushless Motors
- Gemfan GT2205 2650KV Brushless Motors
- HOBBYMATE Quadcopter Motors Combo
И в дополнение к списку рекомендуемые контроллеры скорости:
- 35A ESC BlHeli32 32bit DSHOT1200
- Thriverline Sunrise ESC 20A BLHeli-S
Пропеллеры можно купить металлические 9-дюймовые. Эти изделия по доступной цене свободно приобретаются на рынке. Металлические конструкции прочны, не поддаются изгибу при высоких нагрузках в процессе полёта. Однако для более высокой производительности винтов – лучший вариант карбоновые пропеллеры. Например, эти:
- BTG Quick Release Carbon Fiber Reinforced Propellers
- Performance 1245 Black Propellers MR Series
- YooTek 4 Pairs Foldable Quick Release Propellers
- Myshine 9450 Self-tightening Propeller Props
- Jrelecs 2 Pairs Carbon Fiber Propellers
Электроника и модуль питания
Набор электроники дронов (квадрокоптеров) традиционно состоит из контроллера полёта и беспроводной системы управления. Сюда же можно отнести и модуль питания, так как большинство питающих модулей наделяются электронной системой мониторинга АКБ.
Состояние заряда аккумулятора – важный момент полёта. Трудно представить, что станется с аппаратом, если АКБ разрядится, к примеру, во время полёта над водоёмом. Контроллер полёта поддерживает стабильность полёта квадрокоптера, путём обработки данных относительно направления и силы ветра, а также многих других параметров.

Контроллер, как правило, оснащается так называемой «прошивкой» — микросхемой памяти, куда записываются базовые сведения для чипа, подобного микроконтроллеру фирмы AVR.
Контроллер полёта можно купить в готовом варианте, но не исключается также сборка схемы своими руками. Правда, для второго варианта необходимо иметь навыки электронщика и соответствующие знания программирования. Поэтому проще всё-таки воспользоваться готовыми решениями.
Готовые решения контроллеров дронов
Примеры готовых моделей контроллеров под управление дронами:
ArduPilot – качественный контроллер (дорогостоящий), предназначенный для летательных аппаратов беспилотного управления. Прошивка отличается наличием полностью автоматизированных режимов полёта. Система обеспечивает высокие технические характеристики.
OpenPilot CC3D – система на базе Digital Motion Processor, наделённая целым семейством датчиков организации полёта. Включает в состав трёхкоординатный акселерометр и гироскоп. Проект достаточно легко настраивается и устанавливается. Имеется руководство пользователя.
NAZE32 – тоже достаточно гибкая и мощная система, но видится несколько усложнённой в плане настройки. Оснащается продвинутой программой прошивки.
KK2 – одно из популярных решений, которое часто выбирают начинающие, так как контроллер относительно недорогой и оснащается ЖК-дисплеем. Основой схемы является микроконтроллер AVR одной из последних модификаций. Схемой предусматривается подключение датчиков MPU6050. Однако настройка только ручная.
Беспроводная система дистанционного управления состоит из передатчика и приёмника радиосигналов. Посредством системы ДУ осуществляется не только управление полётом, но также управление положением видеокамеры, установленной на дроне.

Здесь, как правило, используются исключительно готовые решения. Например, любая из систем ДУ в списке ниже:
- Futaba 10JH 10-Channel Heli T-FHSS Computer Radio System
- Turnigy 9xr PRO Radio Control System
- Spektrum DX8 Radio Transmitter
- YKS FlySky FS-i6 2.4GHz 6 Channels Radio Control System
Сборка дрона (квадрокоптера) своими руками
На созданной раме устанавливаются электродвигатели. Возможно, придётся рассчитать местоположения моторов и просверлить в раме отверстия под крепление, если нет иных вариантов.

Затем монтируются контроллеры скорости. Традиционно эти модули устанавливаются на нижней плоскости рамы. Контроллеры скорости через ленточные кабели соединяются непосредственно с двигателями.
Далее на раму добавляется посадочный модуль – часть конструкции, предназначенная для организации «мягкой» посадки дрона. Исполнение этого конструктивного элемента должно предусматривать смягчение ударов при посадке на твёрдую почву. Конструкции возможны разного плана.
На следующем шаге монтируется контроллер полёта. Месторасположение этого модуля не критично. Главное, чтобы обеспечивалась защита электроники и бесперебойная работа.
Рекомендуется подложить под электронную плату кусок губчатого материала для гашения вибраций, передаваемых работающими электродвигателями квадрокоптера.
Контроллер полёта дрона соединяется по прилагаемой схеме к модулю (приёмнику) дистанционного пульта управления и к электронной плате регулировки скорости моторов. Все соединения делаются посредством надёжных разъёмов, а наиболее важные точки «садятся» на оловянную пайку.
В принципе, основная сборка на этом завершается. Но спешить закрывать дрон корпусом не стоит. Необходимо протестировать все системы – датчики и другие компоненты квадрокоптера, используя для этого специальный софт OpenPilot GCS (CC3D и GCS). Правда, релиз программы довольно старый и новыми разработками может не поддерживаться.
После теста собранный аппарат – беспилотный квадрокоптер готов к полёту. В дальнейшем дрон несложно модернизировать — оснастить видеокамерой и прочими устройствами, расширяющими функциональность.
КРАТКИЙ БРИФИНГ
Z-Сила — публикации материалов интересных полезных для социума. Новости технологий, исследований, экспериментов мирового масштаба. Социальная мульти-тематическая информация — СМИ .
Источник: zetsila.ru