Первый робот пылесос, запущенный в серийное производство, был от шведской компании Electrolux, и звался Trilobite. В нем использовался принцип случайной навигации. В данном случае пылесос попросту передвигался по помещению пока не разрядится встроенная батарея. Было это в 2002 году.
На сегодня такие модели уже не встречаются, и на смену случайной навигации пришли разнообразные датчики, лидары, и системы навигации, строящиеся на алгоритмах. В данной статье мы познакомим Вас с типами навигации в роботах пылесосах Xiaomi.

Xiaomi Mijia 1C Sweeping Vacuum Cleaner Лидер поломок?
Система навигации, основанная на алгоритмах, работает за счет установленных в корпусе робота пылесоса инфракрасных датчиков. А также за счет датчиков, установленных в переднем бампере пылесоса. Так, при прикосновении бампером какого-либо препятствия, пылесос меняет свою траекторию движения. Все движения робота пылесоса подчинены алгоритмам.
Например, в ходе уборки пылесос самостоятельно понимает, что движется вдоль стены. Для этого в устройстве установлены боковые датчики.
В другом случае, пылесос двигается по спирали и за это также отвечает алгоритм навигации. При таком движении пылесос сначала убирает около двух квадратных метров, после чего переключается на другой квадрат, и постепенно убирает все помещение. Такой алгоритм уборки больше подходит для квартир площадью до 60 квадратных метров.

Во многих моделях роботов пылесосов установлена система навигации SLAM. Ее особенностью является запоминание точки старта и прокладывание маршрута следования. Так, пылесос эффективнее справляется с уборкой помещения, не повторяясь на каких-либо участках. Информация о возможных преградах поступает с установленных боковых и установленных в переднем бампере датчиков. С таким типом навигации роботы пылесосы используют мобильное приложение, в котором отображается виртуальная карта помещения.
Умный дом Xiaomi — на сколько умный и безопасный? Обзор Xiaomi Mi Smart Sensor Kit

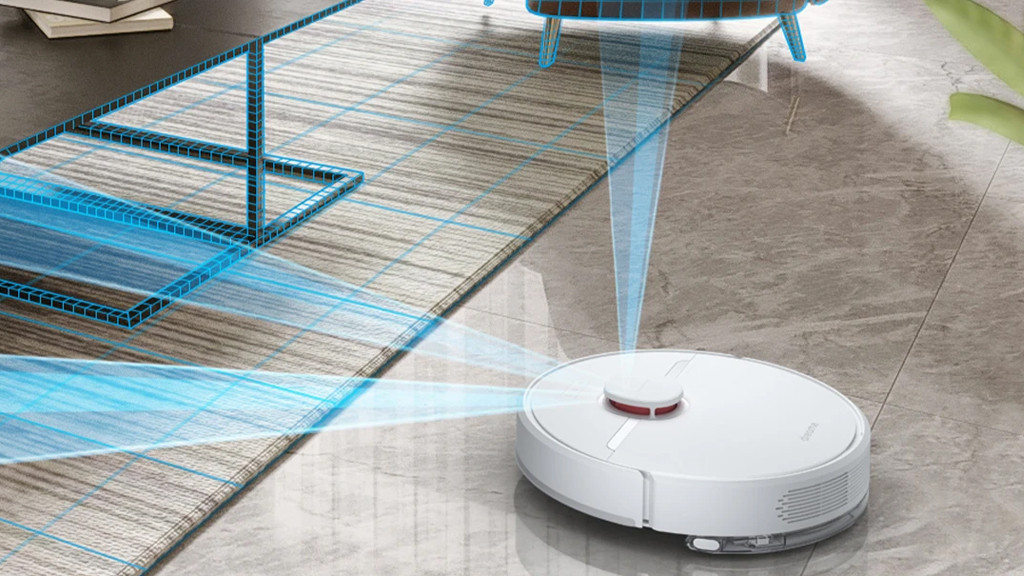
Самым современным и точным типом навигации является лазерная навигация посредством лидара. Он чаще всего установлен в башенке на верхней части корпуса, и с его помощью пылесос определяет расстояние до всевозможных препятствий на пути следования, и информацию об окружающих объектах. Благодаря дальномеру, робот пылесос буквально за секунды создает карту комнат, определяет свое местоположение с высочайшей точностью. Одним из плюсов такой навигации является возможность уборки практически на любых площадях помещений. Именно с таким типом навигации Вы можете купить робот пылесос Xiaomi Mi Robot Vacuum-Mop Pro по выгодной цене.

Также во многих роботах пылесосов устанавливается визуальный датчик навигации. Так, например, Вы можете купить пылесос Xiaomi, а именно модель Dreame F9 с системой оптической навигации Pioneer 2.0. В данном случае в пылесосе в верхней части корпуса встроена камера и 15 различных датчиков. За счет камеры пылесос захватывает 30 тысяч точек помещения в секунду, благодаря чему производится запоминание карт, улучшенная способность обучения и исследования помещения, а также возможность установки виртуальных стен в приложении.

Другая модель пылесоса – Dreame D9 оснащена алгоритмом SLAM, и LDS 3.0. Такой тандем является более точным с отклонением менее десяти миллиметров. В данном случае LDS датчик сканирует помещение со скоростью 2080 точек в секунду, а SLAM на интеллектуальном уровне планирует маршрут следования пылесоса.
Итак, купить роботы пылесосы с различными типами навигации Вы можете в нашем магазине по привлекательным ценам.
Источник: shop.gadgetufa.ru
Визуальный SLAM и с чем его едят

Роботы-пылесосы не могут работать без разработанной системы навигации, так как без этого невозможно будет организовать автоматизированную работу пылесоса в помещении. Для ориентации устройства в пространстве могут быть использованы разные датчики и программное обеспечение – одной из наиболее удачных разработок является внедрение технологии SLAM.
Технология
Под аббревиатурой SLAM принято понимать построение виртуальной карты на основе полученных с помощью внешних устройств данных. Роботы-пылесосы, имеющие подобную технологию, выполняют динамическое построение карты, что подразумевает фотографирование определенной точки с последующим поиском на фотографии отличающихся пикселей. В качестве основы берется любой предмет, например, диван или кресло. Пылесос «запоминает» углы мебели и, делая дальнейшие снимки и сравнивая их с исходным, отслеживает изменение свойств этих углов.
Просто выполнять фотографии недостаточно, поэтому, чтобы понять, где именно находится робот в данный момент, он должен получать данные с датчиков сбора информации. Для корректности получения результатов важно соблюдать две вещи – непрерывность и последовательность вычислений.
Обобщенный алгоритм выглядит так:
- Сканирование пространства комнаты.
- Далее идет сравнение текущего и предыдущего кадра, чтобы выявить смещение робота.
- После этого система выделяет характерные точки или метки определенного предмета и снова сравнивает текущий и предыдущий кадр.
- Все изменения заносятся в карту, что дает возможность обновить положение робота за всю историю обновлений.
- Для роботов-пылесосов очень важно проверять маршрут на петли, то есть, не происходит ли прохождение по ранее сканированному пути
- В конце работы алгоритма выполняется так называемое выравнивание общей карты местности.

Особенности применения
Есть два специфических момента в использовании технологии. Роботы-пылесосы заранее не знают в какой именно среде они находятся – изначально у них нет ни меток, ни снимков. Каждый раз пылесосу нужно выполнять сканирование окружающего пространства с помощью камеры и датчиков. Устройства, с которых может выполняться сканирование, различные: камеры, gps-датчик, гироскоп и многие другие.
Далее нужно понимать, что построение виртуальной карты при помочи перечисленных датчиков возможно только тогда, когда среда будет являться статичной. Динамически изменяющаяся среда приводит к искажениям получаемой роботом информации и ошибкам при построении карты. Нельзя менять расположение предметов, входить «в кадр» и другими способами мешать работе SLAM. Даже небольшое изменение яркости света приведет к тому, что сканирование придется выполнять снова. Иначе робот начнет теряться в пространстве, более долго продвигаться по маршруту или вовсе выходить за пределы помещения.
Само по себе использование алгоритмов SLAM не принесет никаких результатов, если производители не добавят другие методы ориентирования в пространстве. Пылесос может заехать под мебель, и тогда сориентироваться по камере или сенсорам будет намного сложнее. Умные пылесосы способны двигаться между разными комнатами, а потом успешно возвращаться на базу. В памяти устройства карта остается до тех пор, пока не будет выполнено новое сканирование.
На практике это позволяет пылесосу выполнять свою работу, при обнаружении малого количества заряда возвращаться на базу, после чего продолжать очистку ровно с того мета, где он остановился в последний раз. Пылесосы старого поколения не могли выполнять подобное, поэтому устройствам приходилось проходить по уже пройденным путям, что увеличивало общее время уборки.
Вместе с построением камеры, пылесосом выполняется определение типа напольного покрытия со степенью загрязнения. Умные роботы способны отличать между собой ламинат и ковер. Обнаружение поверхности, где есть покрытие из шерсти, автоматически подразумевает увеличение силы всасывания. Если же речь идет о местах с сильным загрязнением, то пылесос начнет проходить по локальному участку несколько раз.
Современные пылесосы, имеющие возможность пользоваться SLAM, изначально находятся в средней и верхней ценовой категории, так как для полноценной работы алгоритма требуется получение данных с большого количества сенсоров и датчиков, не говоря уже о камере. Чем более точные камеры и датчики используются, тем выше стоимость устройства. От корректности полученных данных зависит автономность техники – качественные пылесосы требуют к себе как можно меньше внимания со стороны пользователя.
Пылесосы Xiaomi Jimmy от официального дистрибьютора
Источник: pylesos.info
Робот-пылесосы с камерой. Пять моделей с визуальным датчиком для навигации
Визуальная навигация – это золотая середина между дорогой навигацией с лидаром и примитивной на базе ИК-датчиков. С одной стороны, панорамная камера не сильно удорожает итоговый ценник, с другой – позволяет определять границы комнат и достаточно точно позиционировать робота на карте. Для рейтинга я отобрал 5 моделей в ценовой категории от 16 до 20 тыс. руб. Каждый из этих роботов отлично справляется с сухой уборкой в средних домах с произвольной планировкой. Отличия заключаются в дизайне, конструкции и функционале.
Xiaomi Mijia 1C

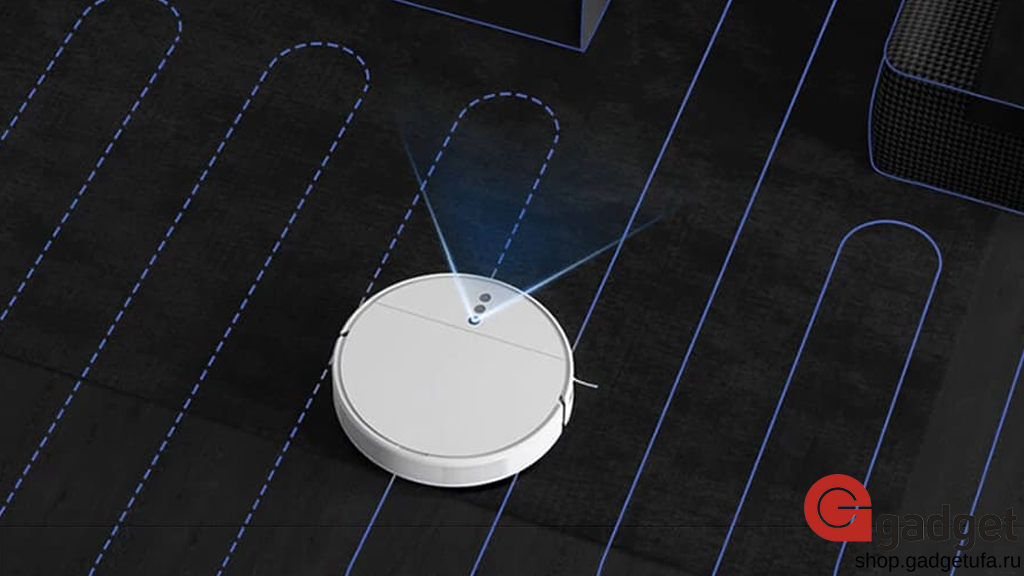
Одна из самых доступных моделей с визуальной навигацией, Mijia 1C выполнена в свойственном Xiaomi стиле: однотонный белый корпус без декоративных элементов. Видеокамера расположена на передней панели рядом с кнопками управления. Она смотрит вверх и собирает данные о конфигурации потолков, на основе чего робот формирует карту помещения.
Через приложение на карте можно устанавливать прямоугольные зоны и виртуальные стены. Инструменты для сухой уборки классические: турбощетка и торцевая щеточка, а вот двигатель для среднего класса нетривиальный – Nidec на 2500 Па. Аккумулятор, с учетом такого двигателя, мог бы быть мощнее – 2400 мАч. Влажная уборка реализована просто и качественно: полукруглая насадка с баком на 200 мл и электронным контролем смачивания салфетки.
Dreame F9

Доработанная версия Mijia 1C, выпущенная дочкой Xiaomi – компанией Dreame. Дизайн, кроме стиля кнопок и логотипа фирмы, оставили неизменным, но функционал и комплектацию улучшили. Новая навигация Pioneer 2.0 позволяет не только обозначать целевые и запретные участки, но и делить квартиру на комнаты: можно отправлять робота на избирательную уборку в спальне, кухне или чулане.
Одно из важных преимуществ этой модели по сравнению с конкурентами – небольшой вес (1,5 кг). Dreame F9 можно легко перемещать в ванную и другие комнаты с порогами выше 20 мм. Дешевый аккумулятор заменили на батарею премиум-класса (5200 мАч), поэтому на одном заряде Dreame может работать до 2,5 часов. Остальной функционал остался без изменений: сухая и влажная уборка с регулировкой силы всасывания и интенсивности подачи воды.
iLife A9s

От других роботов iLife A9s отличается как по внешнему виду, так и по комплектации. Визитная карточка модели – серый корпус с черной глянцевой крышкой и массивным бампером. В переднюю часть крышки вмонтирована панорамная камера, которая работает в тандеме с гироскопом и процессором.
С помощью этих инструментов iLife A9s рисует в приложении карту, а затем на её основе строит оптимальный маршрут. Основной алгоритм работы – змейка до полного покрытия помещения, дополнительно можно выбирать движение вдоль стен и по спирали. За сухую уборку отвечают две торцевые и рабочий блок со сменными аксессуарами: ребристый валик для паркета и ворсистая турбощетка для ковров. Для влажной уборки предназначен отдельный модуль с баком на 300 мл и виброшваброй. iLife A9s не просто вытирает полы, но и оттирает застарелые пятна.
Источник: www.ixbt.com