
![]()

| Теги статьи: | Добавить тег |
Работа устройства показана на видео в конце статьи.
Как это работает.
Руководствуясь принципом «все придумано до нас» автор начал с исследований интернета.
В процессе разбора горы рекламы и откровенного бреда на тему, выяснилось, что наиболее полно схема работы была разобрана на англоязычном форуме [1], так же практическая реализация устройства на PIC со всеми алгоритмами нашлась в [2], однако предложенная там схема кроме того, что использует PIC контроллер с которым я к сожалению не знаком, была весьма далека от желаемого результата.
Итогом поиска были следующие выводы:
Робот пылесос Roborock S50 Виртуальная стена
Принцип работы «невидимой стены» заключается в непрерывной отправке посредством узконаправленного инфракрасного луча кодированной 8 битной команды (0xA2) для пылесоса.
Попав в зону действия сигнала пылесос производит разворот и двигается до момента пока сигнал не перестанет приниматься, затем робот возобновляет предыдущую программу.
Сама команда представляет собой пакетную передачу в формате Pronto IR модулированного сигнала с несущей частотой 38-40 кГц, при этом в полученном сигнале биту «1» соответствует посылка модулированного сигнала длительностью 3 мс (миллисекунды) с паузой 1 мс, а биту «0» — посылка модулированного сигнала длительностью 1 мс с паузой 3 мс.
Таким образом, непрерывно выдается команда 0xA2 (или 0b10100010), повторяющаяся после паузы в 16 мс (соответствует длительности передачи половины команды).
Форма результирующего сигнала соответствующего команде 0b10100010 приведена на рисунке 2.

Рис.2 Форма сигнала.
Схема для отправки требующегося командного сигнала должна постоянно генерировать один и тот же сигнал 0xA2 по приведенному выше алгоритму, генерировать несущую частоту 38-40 кГц и выдавать модулированный сигнал.
С помощью микроконтроллера AVR можно как генерировать кодовую последовательность требуемой длительности так и генерировать несущую частоту (аппаратный ШИМ). Модуляция для получения результирующего сингала осуществляется путем подключения IR светодиода между выходом ШИМ и выходом кодовой последовательности команды.
Простейшая схема и прототип устройства показаны на рисунке 3.
В качестве генератора сигнала использован микроконтроллер ATtiny13A с питанием 4.8В от 4 NiMn аккумуляторов , контроллер тактируется от внутреннего генератора частотой 9.6 МГц.
В данной схеме несущий сигнал частотой 40кГц снимается с вывода 5 (OC0A) модулирующий сигнал с вывода 3 (PB4)
xiaomi vacuum пылесос виртуальная стена своими руками (нет)

Осцилограмма на выходе генератора вывод 5 (OC0A)
 |
 |
Рис 3. Прототип устройства
Количество деталей минимально, фактически только обвязка Reset.
Устройство по данной схеме было собрано и некоторое время эксплуатировалось, при этом появились очевидные недостатки:
- быстрый разряд батареи поскольку включенное с утра выключалось только по приходу с работы;
- неудобство зарядки-приходилось разбирать корпус чтобы достать аккумуляторы;
- кнопка с фиксацией иногда по ошибке оставлялась или выключеной или наоборот включенной.
- Отсутствовал индикатор разряда
После чего схема была радикально переработана добавлена функция включения/отключения с одной кнопки, автоотключение по времени, индикация разряда и зарядное устройство.
Финальная схема представлена на рисунке 4.
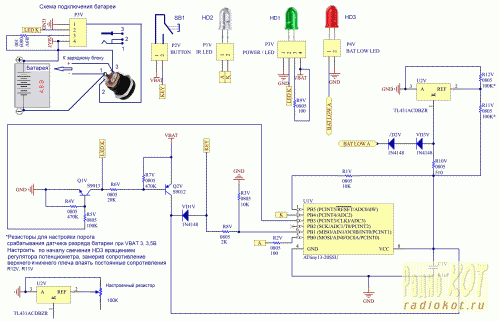
Рис. 4. Схема генератора.
Порядок работы устройства:
При нажатии на кнопку SB1 напряжение питания поступает на вывод 6 (PB1) и через диод VD1V на вход питания 8 (VCC) микроконтроллера U1V, после инициализации контроллера появляется высокий уровень на выводе 2(PB3), что приводит к открыванию транзисторов Q1V, Q2V при этом зажигается светодиод индикатора питания НV1.
После отпускания кнопки SB1 запускается бесконечный цикл генерации командного сигнала, несущая частота снимается на выводе 5 (OC0A) модулирующий сигнал на выводе 3 (PB4) присоединенных соответственно к аноду и катоду инфракрасного светодиода HV2, а на выводе 6 (PB1) устанавливается низкий уровень к которому вывод «притянут» через сопротивление R3V 10кОм, появлению же на PB1 высокого логического уровня с коллектора Q2V препятствует диод VD1V.
Для выключения устройства, достаточно нажать и удерживать кнопку SB1, при этом, на выводе 6 (PB1) устанавливается высокий уровень и после небольшой выдержки, программно, на выводе 2(PB3) уровень изменяется на низкий, транзисторы Q1V, Q2V закрываются индикатор питания НV1 гаснет, после отпускания кнопки SB1 устройство прекращает работу. В начальной версии вывод 2(PB3) был притянут к земле резистором, но практика использования показала, что достаточно внутреннего резистора контроллера и внешний резистор был исключен.
Принцип включения одной кнопкой сделан на примере из статьи опубликованной в журнале Радио №10 за 2002г. (стр. 26).
Индикатор разряда
Индикатор разряда батареи до 3..3,5В выполнен на TL431, светодиод НD3, включенный по инверсной схеме, светится только когда микросхема TL431 заперта.
Когда контролируемое значение напряжения превосходит уровень, определенный делителем R11V и R12V, микросхема TL431 открывается, и ток течет через сопротивление R10V и выводы 3-2 микросхемы TL431. На микросхеме в этот момент существует падение напряжения около 2В, и его явно не хватает для свечения светодиода. Для стопроцентного предотвращения загорания светодиода в его цепь дополнительно включены 2 диода типа 4148.
В момент, когда исследуемая величина окажется меньше порога определенного делителем R11V и R12V, микросхема TL431 закроется, и на ее выходе потенциал будет значительно выше 2В, вследствие этого светодиод HD3 засветится.
Зарядное устройство
Схема зарядного устройства взятая из Data Sheet на МС33340 приведена на рисунке 5 и не представляет какого либо научного интереса, работа ее описана в [5] там же есть программа для расчета. Расчет элементов выполнен под питание от 7,5 В/1500 мА сетевого адаптера снятого с древнего свича, это на пределе возможностей, но зато не греется LM317.
Разведенная плата зарядника у меня уже была сделана под адаптер на 18В, но поскольку в данном случае питающее напряжение не превышает 18В то устанавливать стабилизатор IC3 не потребовалось вместо него поставлена перемычка JVSS (например smd резистор 1206 с нулевым сопротивлением) под которую есть место на печатной плате. При желании схема может быть перерасчитана и на другое напряжение питания.
Для подключения сетевого адаптера установлен разъем типа DC-022 схема подключения указана на рисунке 4. При подключении внешнего адаптера размыкаются контакты 2 и 3 разъема разрывая «земляную» цепь питания генератора, загорается светодиод индикатора зарядного питания HL2. О исправности зарядного устройства и нормальном ходе зарядки можно судить по непрерывному миганию светодиода «контроль заряда» HL1. После того как индикатор HL1 перестанет мигать и будет светить непрерывно, адаптер можно отключить, батареи заряжены.

Рис 5. Схема зарядного устройства.
Использованы компоненты SMD для уменьшения количества сверлений и габаритов. Список деталей приведен таблице по ссылке в конце статьи.
Для подключения сетевого адаптера установлен разъем типа DC-022
Батарейный отсек на 4 аккуимултора АА типа KLS5-809-B
Замена транзисторов Q1V, Q2V возможна на любые подходящие с током коллектора не менее 300мА например BC807,BC817 в корпусе SO-23-3.
Файл прошивки в формате .hex находится в архиве по ссылке в конце статьи.
В настройках фузов достаточно выбрать внутренний источник тактирования «Внутренний RC генератор 9,6МГц». И отключить внутренний делитель на 8 (CLKDIV8).
Программа написана на C в WinAVR ссылка на исходник внизу страницы. Прошивка ATTINY13 формата SOP-8 выполнялась пограмматором AWRProg в самодельной зажимной колодке, как вариант программировать можно при распаяной на плату одной микросхеме контроллера с обвязкой по RESET путем подпайки проводов на нужные контактные площадки, затем установить остальные детали, проверить работоспособность и провода программатора отпаять от контроллера. При проверке работоспособности программатор необходимо отключать.
Сборка и настройка.
Печатная плата односторонняя под SMD монтаж (с одной маааленькой перемычкой S1) разработана в ALTIUM, герберы годные под ЛУТ и на завод приложены к статье.
расположение элементов на плате показано на Рисунке 6
Рис.6 Расположение радиоэлементов на плате
Схема соединений с батареей и гнездом подключения стевого адаптера показана на рисунке 4.
Плата довольно легко вытравилась в домашних условиях перекисью и лимонной кислотой (см. рисунок 7).

Рис 7. Печатная плата
Корпус устройства состоит и двух частей соединенных на винтах, нижняя часть это корпус G1202 , а верхняя из стакана под карандаши «от КОМУСА», для эстетичного внешнего вида на крышку и в местах крепления винтами наклеена черная пленка.
В верхней части нижнего корпуса просверлены 4 отверстия под светодиоды
слева направо расположены индикаторы два индикатора HL1 «контроль заряда» и HL2 наличие «зарядного напряжения», на противоположной стороне корпуса индикатор разряда батареи HD3 и индикатор вкл/выкл HD1.
Правильно собранное устройство начинает работать сразу и в особой наладке не нуждается.
Поскольку шина земли у генератора и у зарядного устройства изначально разделены и соединяются на гнезде внешнего питания, возможна раздельная проверка работы зарядного устройства и генератора, а так же подстройка делителя напряжения путем подачи напряжения 3..3,5В на разъем P3V, собственно подстройка делителя напряжения для TL431 выполняется по указаниям на схеме (см. рисунок 4)
Источник: www.radiokot.ru
Виртуальная стена
Вы можете написать сейчас и зарегистрироваться позже. Если у вас есть аккаунт, авторизуйтесь, чтобы опубликовать от имени своего аккаунта.
Примечание: Ваш пост будет проверен модератором, прежде чем станет видимым.
Поделиться
Последние посетители 0 пользователей онлайн
- Ни одного зарегистрированного пользователя не просматривает данную страницу
Объявления
Сообщения

Это если кварц висит.

Правда. На распродаже купил 4 Кроны за 850 руб. Брал тут: https://ali.onl/2arf А повёлся на фотку из отзывов.
Добрый день. В Вашем изделии установлен блокирующий конденсатор по питанию полумоста? Межу эмиттером нижнего ключа и коллектором верхнего? Какое время задержки между импульсами управления на ключах? Поднимите частоту заведомо выше и спокойно смотрите.
Желательно под частичной нагрузкой. Намотайте ТТ и смотрите ток в ключах, и в СТ, очень помогает в осознании картины мира.

И не только проекты но и готовые платы в которых есть симка и можно чем то управлять по сотовым сетям
Полезный совет дать никогда не поздно. И вообще, что такое одиннадцать лет на фоне вечности?
С21 не сигнальный. Первая нога REF «референс» с неё конденсатор идёт на землю. С39 больше 10мкф ставить не надо. Вольтаж любой от 16 и выше тк рабочее 12в. Китайцы поставили на 25в по разным причинам.
Скорее всего чтоб не ждать поставки нужных влепили какие были в наличии. Либо 16вольтовые под рабочие параметры схемы были не подходящие. Менять лучше по номиналу а вот вольтаж можно брать больше-> у таких обкладки тольще и ЭПС ниже.
Источник: forum.cxem.net
Виртуальная стена для робота-пылесоса

Электроника
На чтение 3 мин Опубликовано 28.03.2019

Если ещё с десяток лет назад такой вид техники, как автономный робот-пылесос был для российского потребителя в диковинку, то сегодня в магазинах можно увидеть разнообразие моделей такой техники, обладающих различными функциями и параметрами. Многие пользователи при этом не слишком доверяют такой технике, так как опасаются, что робот при уборке может повредить хрупкие предметы вроде стеклянных ваз или дверок шкафов, однако производители уже давно предусмотрели это и теперь пылесосы снабжаются так называемыми виртуальными стенами, речь о которых и пойдёт в этой статье.
Что представляет собой виртуальная стена для робота-пылесоса

Виртуальная стена – это небольшое устройство, по форме зачастую напоминающее утюжок, главная функция которого – ограничение границ уборки робота-пылесоса. Питается виртуальное устройство от батареек, которые чаще всего идут в комплекте. Оно обычно снабжено всего одной кнопкой (включения/выключения). Принцип действия основан на ориентации робота-пылесоса по инфракрасным датчикам, которыми он снабжён.
Справка! ИК-лучи, испускаемые виртуальной стеной, невозможно заметить невооружённым глазом, однако снабжённое соответствующими датчиками устройство легко сможет по ним ориентироваться.
Как работает виртуальная стена
Как уже было упомянуто, принцип работы устройства основан на использовании ИК-лучей и датчиков, способных эти лучи улавливать. Обнаруживая такой луч у себя на пути, робот-пылесос воспринимает его в качестве преграды и выстраивает дальнейший маршрут таким образом, чтобы не пересекать обозначенной стеной черты.
Использование технологии ограничения зон уборки при помощи таких стен подразумевает некоторое участие человека, ведь расставить эти самые стены хозяин помещения должен своими руками. Здесь имеет значение правильное расположение, обеспечивающее покрытие максимальной зоны для будущей уборки. Важно, чтобы в этой зоне не было посторонних хрупких предметов или штор. Для более удобного зонирования многие приобретают сразу по несколько виртуальных стен.
Нужна ли роботу-пылесосу виртуальная стена
Согласно заверениям специалистов, использование такого устройства, как виртуальная стена имеет следующие однозначные преимущества:

- Возможность максимальной автоматизации процесса уборки.
- Возможность обезопасить хрупкие предметы.
- Возможность «оградить» от прибора зону у окна, где он может «запутаться» в низких шторах.
- Возможность зонирования уборки в квартирах-студиях и больших помещениях.
Справка! Особенно полезно применение подобных устройств в домах и квартирах, где есть домашние животные. Автономная техника в таком случае при правильной расстановке ограничителей никогда не опрокинет чашку с едой питомца и не засосёт внутрь себя его обед или ужин.
Если сравнивать такое устройство с системой специальных камер, на основе данных с которых многие модели роботов-пылесосов составляют карты уборки, то он имеет небольшое перед ними преимущество, так как такая система ограничения зоны реже даёт сбои. Кроме того, применение камер подразумевает каждый раз при перемене местоположения крупных предметов в помещении составление нового плана уборки.
Если же провести параллель между такой стеной и виртуальным маяком, то чаще всего последний будет обладать более солидным количеством преимуществ. Основная задача маяка – разрешать либо запрещать прибору перемещаться в другие помещения, а по завершении работ возвращаться на станцию подзарядки.
Устройство позволяет прибору переместиться в следующую комнату, когда уборка в первой окончена, что в целом позволяет добиваться более высокого уровня автономности и качества уборки, хотя и при применении маяка сбои в работе не становятся большой редкостью. Кроме того, большинство моделей, поставляемых на рынок сразу с навигационным кубом, стоят куда дороже, нежели «классические».
Подводя итог, можно заключить, что виртуальные стены – фактически незаменимое устройство для использования вместе с роботом-пылесосом. Их эксплуатация позволяет не только обезопасить от повреждений предметы интерьера и сам прибор, но и повысить общее качество уборки.
Источник: reedr.ru