Меня вполне устраивает основной принцип работы плагина пылесоса в приложении Mi Home, то есть выбор от одной до нескольких комнат и запуск пылесоса на «Уборку участка». При этом мощность всасывания и силу полива на тряпку я когда-то выставил в определенные значения и больше их не менял.
А поскольку мой «умный дом» уже больше года управляется HA, я решил соорудить что-то похожее в этой системе, чтобы пользоваться только одним приложением.
Многим известный компонент xiaomi_vacuum (https://github.com/Concentricc/xiaomi_vacuum) больше не поддерживается автором, поэтому я решил использовать альтернативную интеграцию Xiaomi Miot For HomeAssistant. Но сначала нам нужно добыть токен пылесоса.
Токен
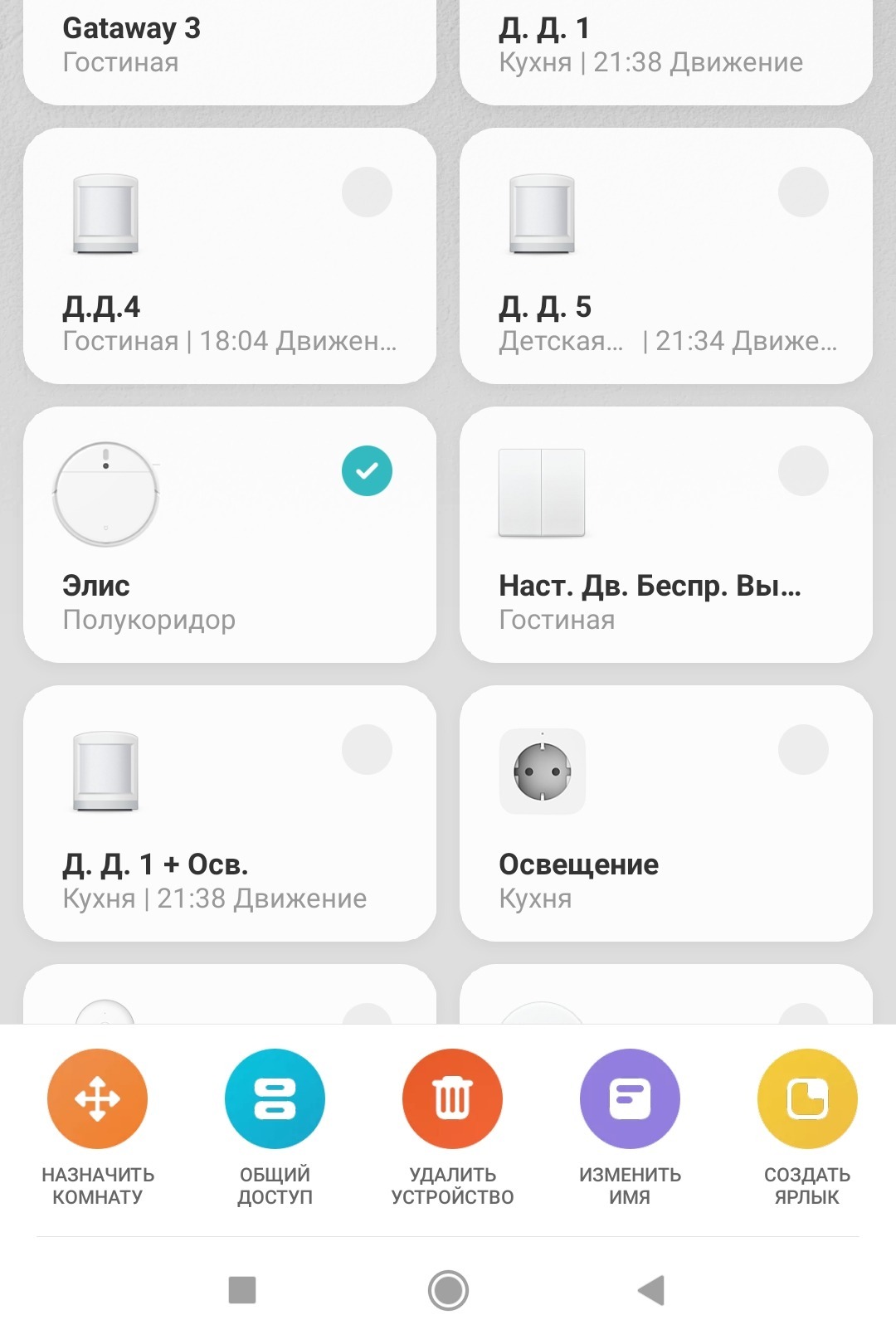
Добавить устройство в интеграцию можно либо с помощью ввода логина и пароля от Mi аккаунта (т.е. через облако), либо локально (что предпочтительнее) через ввод токена устройства. Чтобы достать токен пылесоса, устанавливаем мод. приложение Mi Home от VEVS .https://www.vevs.me/. После ввода логина и пароля от Mi аккаунта, на странице, где расположены все устройства, нажимаем и удерживаем плитку с пылесосом, пока внизу экрана не появятся ярлыки действий.
Mi Robot Vacuum Mop — Распаковка и настройка
Выбираем «Изменить имя».
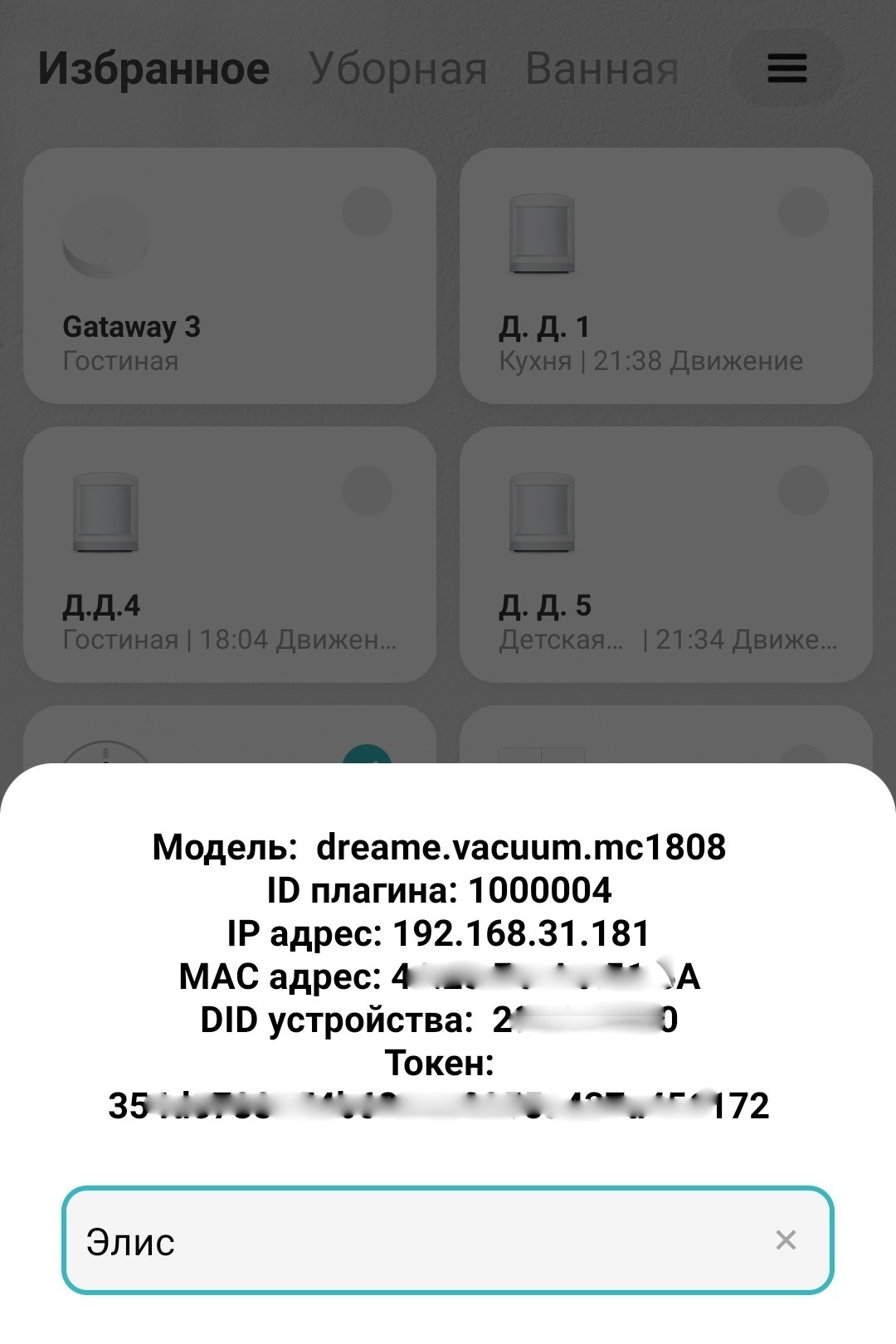
После этого откроется окно с информацией об устройстве, в т. ч. и токеном
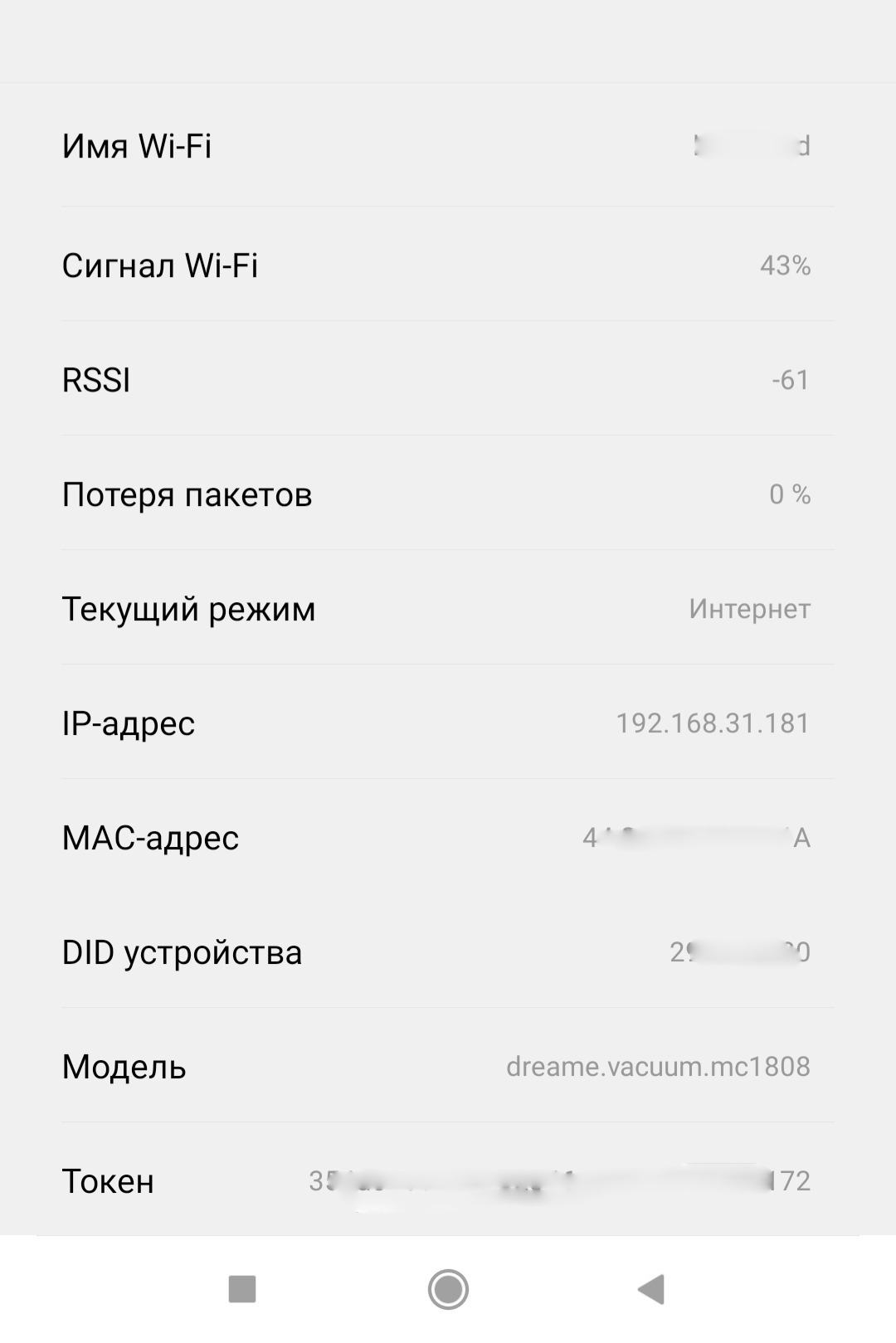
Также токен можно найти, зайдя в плагин устройства — три точки — Дополнительные настройки — Информация о сети
Xiaomi Miot
После установки компонента Xiaomi Miot одним из двух предлагаемых на github способом, заходим в «Настройки» — «Интеграции» и кликаем на кнопку «Добавить интеграцию». Находим в списке «Xiaomi Miot Auto» .

Выбираем локальный способ (с токеном).
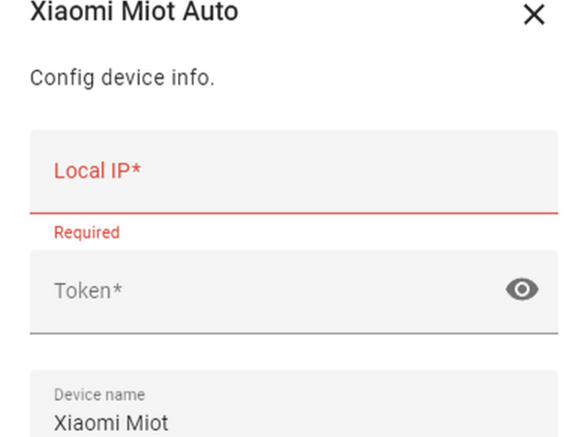
В окне в соответствующие строки вписываем IP-адрес пылесоса, его токен и будущее имя. После успешного добавления, перезагружаем HA.

В системе появляется большое количество сущностей, связанных с пылесосом, которые можно будет использовать по своему усмотрению.
Принцип работы
У пылесоса есть два варианта уборки: «Зональная уборка» и «Уборка участка». Ниже приведены оба формата команды уборки. Зональная уборка:
Копировать
— service: xiaomi_miot.call_action data: entity_id: vacuum.alice_vacuum_mop siid: 18 aiid: 1 params: — piid: 1 value: 19 — piid: 21 value: ‘-5975,-588,-5475,-88’ force_params: true
Где во второй строке «value» прописаны координаты прямоугольной зоны уборки. Координаты пишутся в формате: X,Y вершина одного угла прямоугольника и X,Y вершина угла по диагонали.
Отсчет координат (в мм) начинается в точке, где пылесос останавливается на секунду после выезда с докстанции. Направление оси X идет как раз к этой самой станции, а направление оси Y при этом идет влево (вверх на рисунке). См. рисунок.

Копировать
— service: xiaomi_miot.call_action data: entity_id: vacuum.alice_vacuum_mop siid: 18 aiid: 1 params: — piid: 1 value: 18 — piid: 21 value: » force_params: true
Здесь в квадратных скобках прописаны: 5-номер комнаты; 1-либо доп. знакоместо для нумерации комнат, если не хватает первого (больше десяти), либо для количества повторов уборки, для другой модели пылесоса (наш вроде не поддерживает); 1-мощность всасывания (0-3); 3-сила полива на тряпку. Последняя цифра мною не изучена.
Как я писал вначале, меня интересуют только номера комнат, то есть только первая цифра.
Формат строки может быть и таким:
Копировать
value: »
В этом случае пылесос поедет убирать комнаты номер 5, 1 и 3, но последовательность уборки он определяет сам.
Таким образом в эту строку можно «запихнуть» от одной до всех комнат, что мне и нужно.
Реализация
Чтобы реализовать имитацию работы плагина пылесоса в Mi Home, создаем для каждой комнаты input boolean, и объединяем их в группу:
Копировать
input_boolean: bedroom_vacuum: name: «Спальня уборка» halfhallway_vacuum: name: «Полукоридор уборка» hallway_vacuum: name: «Коридор уборка» livingroom_vacuum: name: «Гостиная уборка» childrensroom_vacuum: name: «Детская уборка» kitchen_vacuum: name: «Кухня уборка» group: all_rooms_for_vac_clean: name: All rooms for vacuum clean entities: — input_boolean.halfhallway_vacuum — input_boolean.hallway_vacuum — input_boolean.bedroom_vacuum — input_boolean.livingroom_vacuum — input_boolean.childrensroom_vacuum — input_boolean.kitchen_vacuum
Затем придумываем такой сенсор:
Копировать
sensor: select_rooms_for_clean: value_template: > <«selects»:[<>]> friendly_name: «Выбранные комнаты для пылесоса» icon_template: mdi:vacuum
Он просматривает нашу группу на предмет включенных input boolean, затем забирает их названия, записывает их в строку, разделяя запятой, и, наконец, заменяет каждое имя в списке соотвестовующим набором цифр в квадратных скобках. Т.е. если у нас кухня — это комната 1, то активный input boolean «Кухня» будет заменен строкой [1,1,1,3,1] и так далее.
На выходе к набору цифр в скобках добавляются недостающие знаки для формирования полноценной строки. После перезагрузки HA появляется сенсор, формирующий нужную нам строку:
Пишем скрипт, в который закидываем значение нашего датчика.
Копировать
clean_select_rooms: alias: Убрать выбранные комнаты sequence: — service: xiaomi_miot.call_action data_template: entity_id: vacuum.alice_vacuum_mop siid: 18 aiid: 1 params: — piid: 1 value: 18 — » >>»
В принципе, после этого достаточно вывести наши булеаны в интерфейс и всё будет работать.
Дополнитльно я написал автоматизацию, которая сбрасывает булеаны после окончания уборки:
Копировать
automation: — alias: ‘reset_select_rooms’ id: Reset select rooms trigger: — platform: state entity_id: vacuum.alice_vacuum_mop to: ‘docked’ condition: [] action: — service: input_boolean.turn_off entity_id: — input_boolean.halfhallway_vacuum — input_boolean.hallway_vacuum — input_boolean.bedroom_vacuum — input_boolean.livingroom_vacuum — input_boolean.childrensroom_vacuum — input_boolean.kitchen_vacuum
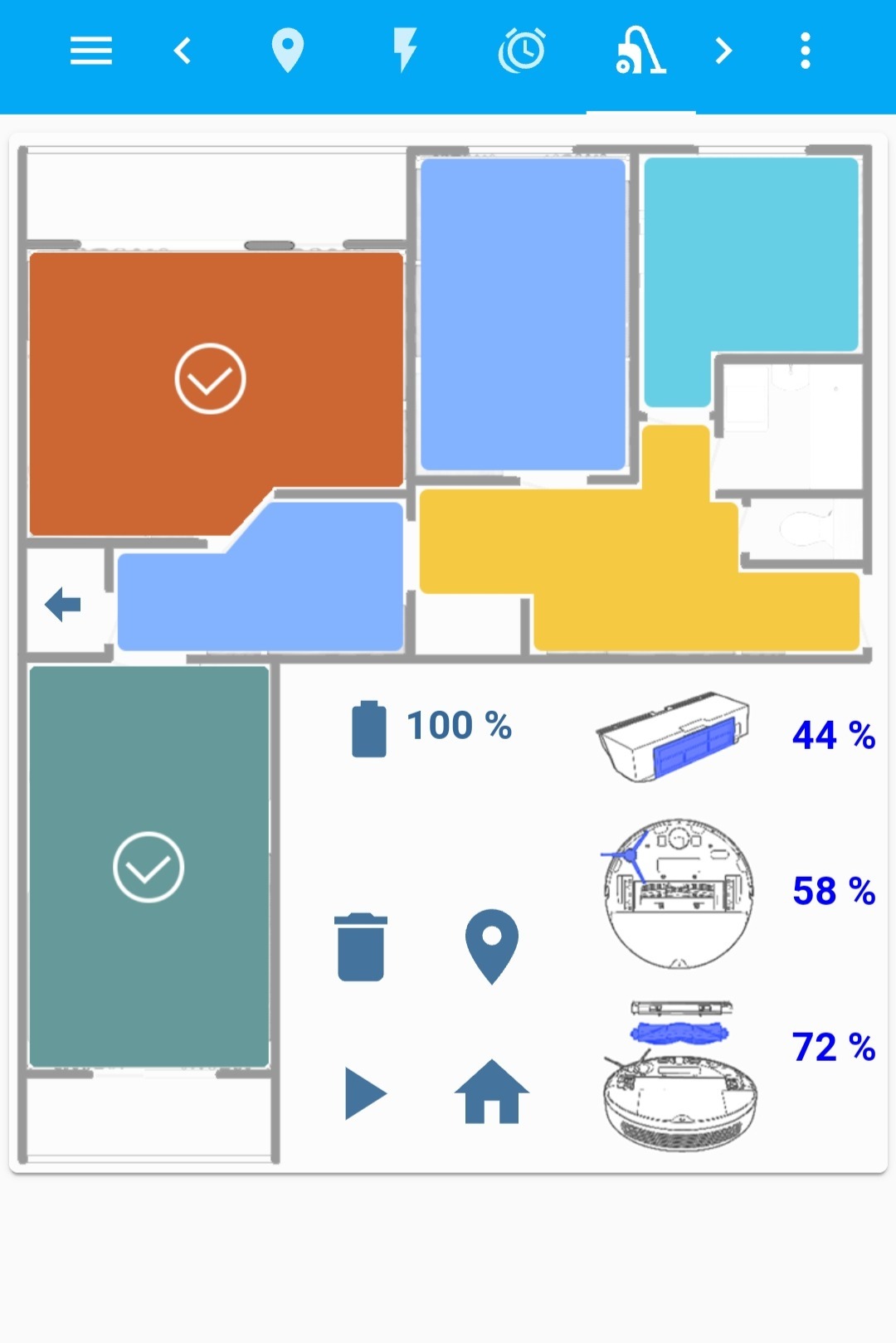
Ну и наконец, делюсь идеей оформления карточки пылесоса. Поскольку моя цель была симитировать базовую функцию плагина Mi Home, я решил сделать нечто похожее. По виду — очень на любителя. При создании карточки, использовался один из множества мануалов по оформлению интерактивного 3д плана помещения для HA, поэтому нет смысла подробно его здесь описывать. В двух словах:

Создаем фоновый рисунок квартиры
Создаем рисунки каждой комнаты в отдельности
Создаем рисунки каждой отмеченной комнаты в отдельности (я сменил яркость и добавил галочки в кружочках)

Создаем рисунок прозрачного квадрата, который будем располагать примерно в центре каждой комнаты (для удобства, лучше дополнительно создать такой же квадрат, только с цветом, чтобы удобно было размещать, потом в эти координаты вставляем вместо цветного квадрата прозрачный)
Закидываем все рисунки в папку WWW
Дальше — код в lovelace.
Приведу пример кода для фона и одной комнаты:
Копировать
— title: Vacuum # path: floorplan # panel: true icon: mdi:vacuum cards: — type: picture-elements image: /local/plan_for_vacuum_3.png ###### План квартиры ####### elements: — type: image ################ Спальня ################# entity: input_boolean.bedroom_vacuum tap_action: none hold_action: none state_image: «on»: /local/bedroom_check.png «off»: /local/bedroom.png style: top: 50% left: 50% width: 100% ################### Кнопки помещений ################### — type: image ################ Кнопка спальни ################# entity: input_boolean.bedroom_vacuum tap_action: action: toggle state_image: «on»: /local/white_square.png «off»: /local/transparent_square.png style: top: 71% left: 16%
Остальные иконки и показания датчиков ничего особенного из себя не представляют. Ниже приведены примеры оформления показания износа фильтра и кнопки пуск/стоп, в зависимости от состояния пылесоса. Если он на зарядке — запустится уборка выбранных участков, если стоит не на зарядке — снимется с паузы. Если ездит — встанет на паузу.
Копировать
################ Оставшиеся проценты фильтра ################# — entity: sensor.dreame_mc1808_516a_filter_life_level style: font-family: Trebuchet MS font-size: 120% font-weight: bold left: 87% opacity: 1.0 top: 58% transform: ‘translate(0%,-50%)’ color: blue type: state-label — type: conditional conditions: — entity: vacuum.alice_vacuum_mop state_not: «cleaning» — entity: vacuum.alice_vacuum_mop state_not: «docked» elements: — type: state-icon tap_action: action: call-service service: vacuum.start service_data: entity_id: vacuum.alice_vacuum_mop confirmation: true entity: vacuum.alice_vacuum_mop icon: mdi:play style: top: 92% left: 40% —mdc-icon-size: 40px — type: conditional conditions: — entity: vacuum.alice_vacuum_mop state: «docked» elements: — type: state-icon tap_action: action: call-service service: script.clean_select_rooms confirmation: true entity: vacuum.alice_vacuum_mop icon: mdi:play style: top: 92% left: 40% —mdc-icon-size: 40px — type: conditional conditions: — entity: vacuum.alice_vacuum_mop state: «cleaning» elements: — type: state-icon tap_action: action: call-service service: vacuum.pause service_data: entity_id: vacuum.alice_vacuum_mop entity: vacuum.alice_vacuum_mop icon: mdi:pause style: top: 92% left: 40% —mdc-icon-size: 40px
На этом заканчиваю свою первую статью. Прошу сильно не ругать.
Источник: sprut.ai
Робот-пылесос Xiaomi 1C Sweeping Vacuum Cleaner (CN/EU)

В свое время один из лучших роботов пылесосов Xiaomi c влажной уборкой и функционалом по соотношению цена/качество. В настоящее время теряет актуальность из-за выхода новых моделей.
Существуют две версии пылесоса: для Китайского рынка и Глобальная версия.
В передней части пылесоса находиться черная глянцевая полоса, под которой спрятаны 7 инфракрасных датчиков, которые видят на 20 см вперед и позволяют пылесосу не врезаться в стены и ножки мебели.
Из «коробки» доступна одна официальная русская озвучка. При использовании модифицированного MiHome на Android доступно несколько вариантов русских голосовых пакетов.
Данная модель лишена лазерного дальномера, но оснащена камерой, для лучшего позиционирования и определения дверных проемов. Отсутствие лидара является отчасти и плюсом, в виде малой высоты пылесоса, что дает ему возможность заехать в места, куда пылесосы с лазерным дальномером не проедут.
Может убираться в отдельных комнатах, есть запретные зоны и виртуальные стены.
Аккумулятор емкостью 2400 мАч позволит убрать на одной зарядке площадь до 90 кв.м., а датчики глубины не дадут пылесосу упасть с лестницы.
Интерфейс приложения на русском языке.
| навигационная камера |
| большой пылесборник 600мл |
| высокая мощность всасывания 2500Па |
| влажная уборка |
| интеллектуальное управление подачи воды насосом |
| тонкий корпус высотой 8,2 см |
| русифицируется |
| нет лазерного дальномера (LIDAR) |
| аккумулятор меньшей емкости 2400 мАч |
Источник: rumihome.ru
Обзор робота-пылесоса Xiaomi Mijia 1T Sweeping Robot
Известная китайская корпорация Xiaomi по-серьезному взялась за рынок роботов-пылесосов и выпускает разные их модели. В нашей тестовой лаборатории появился Mijia 1T Sweeping Robot — из тех, которые ориентируются по оптическим датчикам.

Эта модель может не только пылесосить, но и мыть полы. Литий-ионный аккумулятор емкостью 5200 мА·ч обещает длительную работу, а навигация со смартфона — удобное управление.
В процессе тестирования мы выясним, помогают ли датчики не спотыкаться на неровностях пола, как у этого робота с навигацией и хорошо ли он наводит чистоту — ведь у него всего одна боковая щетка.
Характеристики
Комплектация
Пылесос упакован в коричневую картонную коробку со схематическим изображением устройства на лицевой стороне. Помимо индекса модели «1T» на ней нет ни единого латинского символа — только иероглифы.

Вскрыв коробку, внутри мы обнаружили:
- сам пылесос с установленным мусоросборником
- боковую щетку
- блок для влажной уборки
- фибровую D-образную тряпку для мытья пола
- базу для зарядки
- сетевой адаптер
- переходник для адаптера на европейскую вилку
- руководство пользователя
На первый взгляд
У Xiaomi Mijia Sweeping Robot 1T привычная для большинства роботов-пылесосов круглая форма и стандартные размеры. На верхней панели располагаются кнопки управления и оптический датчик, отвечающий за ориентацию устройства.

Еще один оптический датчик расположен в передней части прибора, на бампере. Он фиксирует приближение к препятствиям и облегчает работу инфракрасным сенсорам, которые размещены за темным стеклом, опоясывающим бампер.

Как и у большинства приборов этого типа, подвижный бампер занимает половину окружности робота и снабжен не только оптическими, но и механическими датчиками, срабатывающими при наезде на препятствие. Отверстия для выхода воздуха находятся в задней части.

Контейнер для мусора размещается под откидывающейся верхней панелью пылесоса.

Система фильтрации у Xiaomi Mijia Sweeping Robot 1T несложна: роль предварительного фильтра исполняет мелкая капроновая сетка на выходе из мусороприемника, а для тонкой очистки в контейнере установлен прямоугольный HEPA-элемент с резиновыми уплотнителями по периметру.
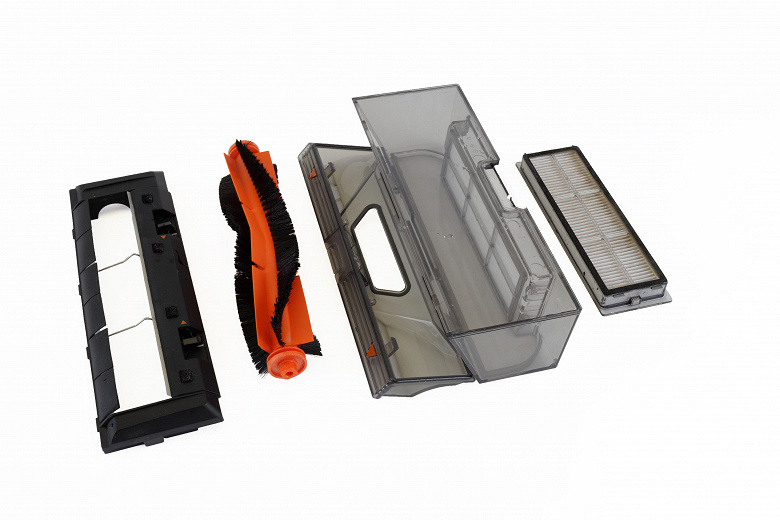
Центральная щетка снабжена тремя U-образными рядами щетины и таким же количеством силиконовых ламелей: эта конструкция одинаково эффективна и на твердых покрытиях, и на коврах. У рамки, фиксирующей щетку, есть две стальные скобки, не позволяющие пылесосу намотать на вал электропровода и крупные предметы, случайно оказавшиеся на полу.
Единственная боковая щетка расположена с левой (если смотреть на работающий прибор сверху) стороны нижней панели. Она крепится на защелке, и ее можно легко заменить в случае поломки или износа.

Ходовая часть прибора не менее традиционна: одно направляющее колесо и два ведущих. Направляющее с гладкой поверхностью находится в пластиковой сфере и способно вращаться на 360°. У протекторов ведущих есть выраженные грунтозацепы, а их подвеска позволяет изменять клиренс робота от 1 до 3,5 см.

Блок для влажной уборки представляет собой неглубокий D-образный контейнер, пристегивающийся к дну корпуса на защелках. На его верхней стороне есть контакты для питания внутреннего моторчика, нагнетающего воду при мытье пола, и заливная горловина, закрытая силиконовой пробкой.

Фибровая тряпка крепится к блоку влажной уборки при помощи липучек-велкро.

В верхней части базы есть окошко из ИК-прозрачного пластика. Под ним — датчики, обеспечивающие позиционирование робота относительно базы при уборке и возвращении на зарядку.

В комплекте с базой используется электрошнур с вилкой китайского стандарта, но к нашему экземпляру прибора прилагался и переходник на европейскую.

В коробке мы обнаружили и приспособление с гребенкой для чистки HEPA-фильтра и лезвием для срезания со щеток намотавшихся ниток и длинных волос.
Инструкция
Прилагаемая к пылесосу документация — также, как и информация на коробке, — на китайском языке. Для тех, кто пока еще плохо умеет читать на языке Поднебесной, в коробку вложено руководство по быстрому началу работы с прибором, содержащее понятные картинки.
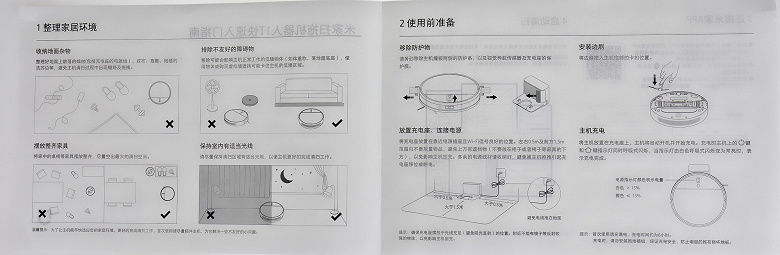
Рассмотрев документ и подумав над схемами, даже не имеющий опыта обращения с робопылесосами пользователь вполне способен разобраться, как распаковать прибор, выбрать место для базы, подготовить помещение к уборке и начать эксплуатацию.
Ценной, с нашей точки зрения, информацией, почерпнутой из иллюстрированного руководства, является необходимость запускать уборку при дневном или искусственном освещении: действительно, Mijia 1T оснащен оптическими датчиками, работающими в видимом диапазоне, и малоэффективен в темноте.
Управление
На верхней панели пылесоса две кнопки с понятными логотипами. Одна из них запускает пылесос в режиме автоматической уборки, вторая включает режим возврата на базу.

Длинное нажатие на кнопку запуска погружает пылесос в сон, а длинным нажатием на обе кнопки одновременно включается режим синхронизации со смартфоном.
Управление со смартфона
Для управления роботом-пылесосом Mijia 1T Sweeping Robot используется знакомое многим приложение Mi Home от Xiaomi Inc (более 10 миллионов скачиваний, средняя оценка 4.4).
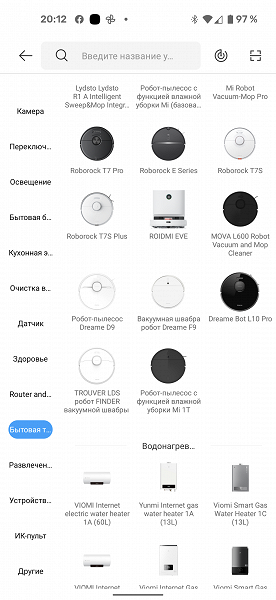
Чтобы подключить наш пылесос, необходимо выбрать соответствующую модель из обширного списка устройств Xiaomi (раздел «Бытовая техника»). Но на этом этапе мы столкнулись с затруднением: Mijia 1T в списке не оказалось, а автоматический поиск устройства завершился неудачей.
Решить проблему помог совет с одного из тематических форумов: чтобы эта модель появилась в списке, следует изменить в настройках приложения регион с российского на «Материковый Китай». Вероятно, пылесос предназначен исключительно для внутреннего рынка или в российской версии приложения он пока не поддерживается.
![]()
![]()
![]()
В остальном подключение прошло гладко: по команде приложения мы зажали обе кнопки на верхней панели и дождались, пока пылесос войдет в режим сопряжения. На этом этапе устройство создает временную Wi-Fi-сеть и предлагает к ней подключиться. Установив соединение, приложение передало в прибор настройки офисной сети, и через полминуты процесс синхронизации успешно завершился.
![]()
![]()
![]()
Как только он закончится, можно переименовать устройство, присвоить его одной из комнат экосистемы Mi Home (по умолчанию это «гостиная») и согласиться с условиями использования приложения.
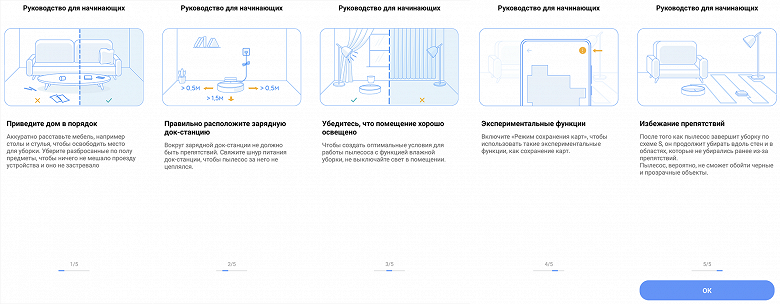
В качестве последнего шага перед началом работы приложение предлагает прочитать краткую инструкцию по использованию прибора — мы уже видели ее на бумаге, но тут она сопровождается русским текстом.
Функции приложения, связанные с картографией, являются экспериментальными и по умолчанию отключены. Мы рискнули пойти на эксперимент и включили режим сохранения карт.
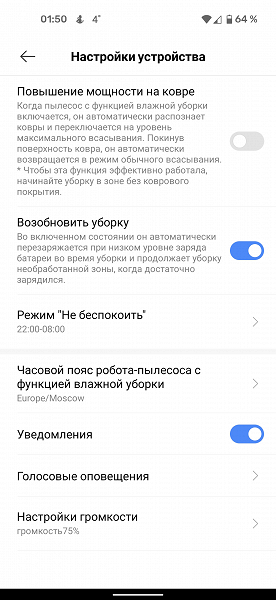
В разделе настроек можно включить также функцию повышения мощности на ковре, разрешить возобновлять уборку после вынужденного перерыва, настроить ночной режим, выбрать часовой пояс, отключить уведомления, выбрать языковой пакет (доступны китайский и английский языки) для голосовых сообщений и нужный уровень их громкости.
Эксплуатация
Перед началом эксплуатации пылесос необходимо освободить от всех упаковочных материалов, включая транспортировочные прокладки между корпусом и бампером устройства.
Разместив базу, как рекомендовано инструкцией (не менее полуметра свободного пространства справа и слева и полтора метра — перед ней), мы полностью зарядили аккумулятор пылесоса — на это ушло около трех часов — и запустили первую уборку.
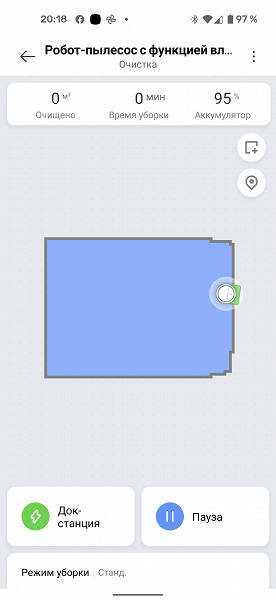
Xiaomi Mijia 1T начинает знакомство с помещением, прямолинейно двигаясь в направлении от базы, пока не встретит препятствие. Наткнувшись на стену или предмет мебели, пылесос разворачивается на 180° через левое плечо — так, чтобы единственная боковая щетка описывала больший полукруг, — и продолжает движение.
![]()
![]()
![]()
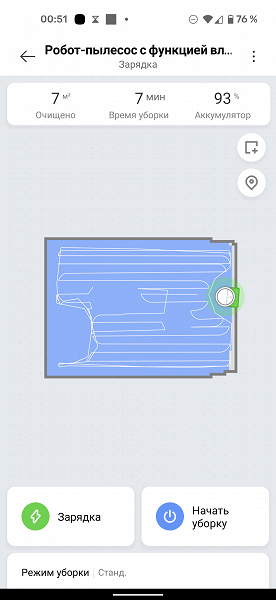
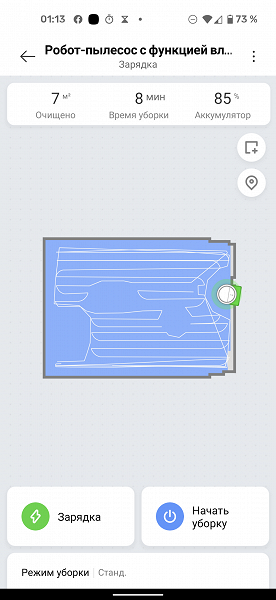
Двигаясь S-образной «змейкой», робот обходит помещение, а на экране приложения (с некоторым запаздыванием: данные хранятся и обрабатываются в китайском облаке, а не передаются напрямую) появляется карта квартиры — так, как ее видит пылесос.
![]()
![]()
![]()
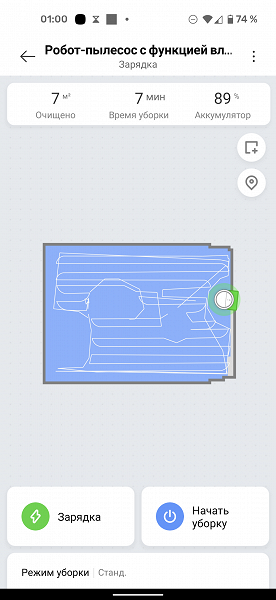
На последнем этапе уборки Mijia 1T еще раз объезжает доступную часть квартиры — по периметру, прибираясь вдоль стен и углов, — после чего рапортует об окончании работы голосовым сообщением и возвращается на базу заряжаться.
По окончании первого объезда квартиры на экране приложения появляется полная карта помещения, размеченная на комнаты довольно логично и похоже на то, что мы видим в реальности. После этого становится доступна уборка по расписанию — как во всем помещении, так и зональная, с указанием нужных комнат и участков.
Благодаря оптическим датчикам робот прекрасно ориентируется, двигаясь прямолинейно и не отклоняясь от запланированного маршрута даже при наезде на препятствия и пороги. Напомним, что слабым местом других роботов-пылесосов, оснащенных только инфракрасными датчиками, является неспособность удержать прямую линию и связанные с этим проблемы с навигацией. А у этой модели система ориентации отличная.
Однако алгоритм, по которому осуществляется обход известного помещения, мы не можем назвать идеальным: робот в точности повторяет один и тот же маршрут движения, раз за разом поворачивая в тех же местах. Пропущенные участки, таким образом, остаются неубранными и при следующем запуске. На наш взгляд, алгоритму движения не помешал бы известный элемент случайности.
В режиме влажной уборки эта модель равномерно, без разводов и капель, протирает поверхность. Наличие моющего модуля пылесос определяет автоматически: в приложении становится доступен режим мойки, при котором работает подающий воду насос, а мощность всасывания снижается.
При приближении к препятствию робот автоматически избегает столкновения с ним, заранее снижая скорость и замедляя вращение боковой щетки. Касания препятствий бампером Mijia 1T почти не допускает.
Базу робот объезжает по дуге радиусом около 40 см, и часть пространства вокруг нее (особенно по бокам) неизбежно останется неубранной.
Достигнув уровня заряда в 20%, робот прерывает уборку и возвращается на базу. Полностью зарядившись, он возобновляет обход помещения с того же места, где прервался. Уборка не будет продолжена, если за время зарядки включился режим «не беспокоить».
Уход
Чтобы извлечь мусоросборник, следует откинуть верхнюю панель прибора и потянуть контейнер вверх. Для опустошения емкости нужно открыть боковую крышку емкости и вытряхнуть ее содержимое в мусорное ведро. HEPA-фильтр при чистке извлекают из ниши мусоросборника, отряхивают и прочищают щеткой прилагающегося к устройству приспособления.
Нитки и длинные волосы, намотавшиеся на центральную и боковую щетки пылесоса, удобно срезать лезвием того же аксессуара.
Согласно иллюстрациям в руководстве пользователя (напомним, что к нашему экземпляру Mijia 1T прилагалась только китайская инструкция) все элементы мусоросборника можно мыть, тщательно высушивая после мытья.
Стирать под краном можно и фибровую тряпку для влажной уборки.
Наши измерения
Мы представляем результаты тестирования устройства по нашей методике, подробно описанной в отдельной статье.
Видео ниже снято с одной точки с полным охватом убираемой территории, при обработке часть видеоряда ускорена в 16 раз. В течение всей уборки пылесос был включен в автоматическом режиме.
Маршрут движения прибора можно видеть на карте из приложения. Точная продолжительность уборки от запуска до сигнала об окончании составила 7 минут 55 секунд. За это время пылесос убрал 90,5% мусора.
Во время второй уборки пылесос почти в точности повторил собственный маршрут, обойдя помещение за 8 минут 24 секунды и увеличив количество собранного мусора до 95,5%.
Мы убедились, что за все три попытки робот двигался одним и тем же маршрутом, поворачивая в тех же местах. Количество неубранного мусора за третий подход увеличилось не слишком ощутимо (большая его часть осталась вокруг центральных препятствий), и мы приняли решение указать пылесосу на недоработки, включив режим зональной уборки.
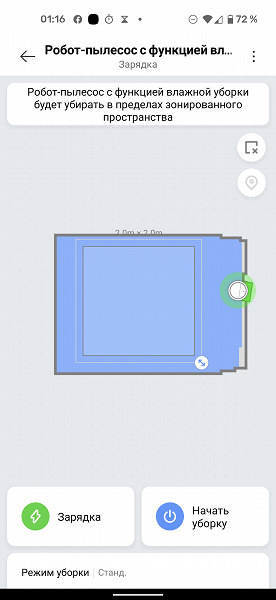
Нарисовав прямоугольную область в середине тестового помещения, мы включили пылесос.
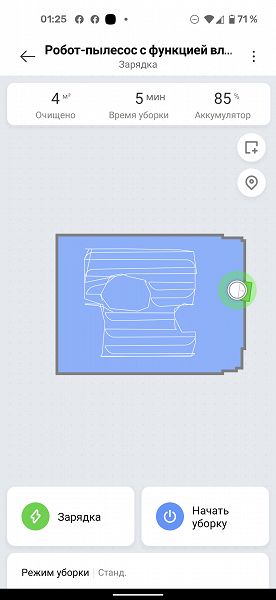
Больше всего сора по-прежнему осталось у центрального препятствия, остался он и у плинтусов. На пространстве вокруг базы мы собрали 0,6% мусора.
![]()
![]()
![]()
Общее качество уборки мы оцениваем как хорошее, но прибору определенно не хватает случайности в алгоритме построения маршрута.
| I | 7:55 | 7:55 | 90,5 |
| II | 8:24 | 16:19 | 95,5 |
| III | 8:06 | 24:25 | 96,3 |
| Зональная уборка | 5:50 | 30:15 | 97,1 |
Прибор, вставший на базу по окончании работы в автоматическом режиме, заряжается в течение приблизительно 3 часов 50 минут. В процессе зарядки база устройства потребляет около до 9 Вт, в режиме ожидания ее энергопотребление составляет менее 0,1 Вт.
Вес пылесоса без установленных модулей составил, по нашим измерениям, 2075 г. Блок пылесборника весит 200 г, а сухой вес модуля влажной уборки — 210 г. Заполненный до максимума бак для воды последнего вмещает, по нашим измерениям, 235 мл.
Продолжительность автономной работы со включенным Wi-Fi и максимальным уровнем мощности составляет около 110 минут. Уровень шума при работе у этой модели составляет, в зависимости от выбранной мощности всасывания, от 58 до 65 дБА.
Выводы
В ходе практических тестов робот-пылесос Xiaomi Mijia 1T Sweeping Robot продемонстрировал неплохие способности к навигации и хорошее качество уборки. Оптические датчики прибора, работающие в видимом диапазоне, помогают ему уверенно ориентироваться в пространстве и сохранять прямолинейное движение, не сбиваясь c прямого пути даже на неровностях пола. Единственным минусом этой технологии является сложность ориентации в темноте: для уборки роботу необходим дневной или искусственный свет.

К числу плюсов прибора мы отнесем неплохо работающее приложение Mi Home, являющееся центром экосистемы этого производителя. Однако о существовании этой модели знает пока что только китайская версия программы, у которой есть проблемы с русской локализацией.
В алгоритме уборки у Mijia 1T имеются терпимые, но досадные недочеты: пылесос стремится в точности повторять один и тот же маршрут. Отсутствие элементов случайности в построении траектории приводит к неравномерной обработке пола и появлению неубранных в течение нескольких запусков участков поверхности.
Отметим также полное отсутствие офлайновой русской локализации: пользователям, не знающим китайский язык, придется довольствоваться электронными версиями документации. Правда, существенной проблемой это, на наш взгляд, не становится.
Плюсы:
- неплохое качество уборки
- хорошая навигация
- длительное время автономной работы
Минусы:
- на момент подготовки обзора модель поддерживается только китайской региональной версией приложения
- неидеальный алгоритм построения маршрута
- относительно высокая цена
В заключение предлагаем посмотреть наш видеообзор робота-пылесоса Xiaomi Mijia 1T Sweeping Robot:
Робот-пылесос Mijia Sweeping Robot 1T предоставлен на тестирование компанией Xiaomi
Источник: www.ixbt.com