Прошу не принимать всё написанное за единственно верную истину. Как раз хочу объяснить, что я человек с творческо-техническим складом ума, но не живу в своем ограниченном мире коптеростроения.
Напротив, я новичок в этом вопросе и пишу статью потому, что загоревшись желанием построить дрона для аэросъемки, столкнулся с тем, что очень много разных мнений и выбрать верный путь очень сложно. Мой первый опыт был не совсем удачным, от этого и хочу всех уберечь, выделив самое важное и акцентируя внимание на важные детали, о которых мало говорят.
Итак, чем же отличаются коптеры и откуда такие названия? Квадрокоптер – это четырехвинтовой аппарат. Этот тип БПЛА (беспилотных летательных аппаратов) на сегодняшний день является самым распространенным и уже фактически стал именем нарицательным для народа, если речь идет о мультироторных системах.
Самый известный четырехмоторный дрон выпустила компания DJI, практически все о нем слышали. Это тот самый Phantom. Но разбирать все модификации бессмысленно. Единственное, я надеюсь, что после прочтения этой статьи вы сами сможете просчитать параметры и понять, почему полетное время между первым и вторым поколениями Phantom’ов изменилось почти вдвое.
Сборка гоночного квадрокоптера своими руками
Гексакоптер — это шестимоторный, а октакоптер, соответственно, восьмимоторный аппарат. Есть еще трикоптеры и так называемые соосные. И тут много споров на тему, как правильно назвать аппарат с 8-мью моторами, но 4-мя лучами, соосный квадрокоптер или всё-таки октакоптер. Моторы располагаются на одной оси один над другим. У такого расположения есть одно преимущество — размеры.
Но на практике те же 8 моторов на октакоптере будут давать более высокий КПД, чем установка на одной оси парных двигателей.
Время летит, поэтому добавляю в статьи свежие строки, актуальные на сегодняшний день, спустя несколько лет после написания статьи. Буду помечать их курсивом и добавлять ссылки на примеры комплектующих в проверенных магзинах, в которых сам совершал покупки. Из бюджетных, но проверенных временем аппаратур управления пользуется популярностью FRSky Taranis Q X7. И старший брат — FrSky Taranis X9D Plus
Одна и та же хорошая аппаратура способна хранить в себе настройки одновременно десятков моделей. То есть, однажды приобретая её, можно пользоваться ею фактически всю жизнь и управлять RC самолётами, вертолётами, машинами, мультикоптерами, просто выбирая в меню аппаратуры нужную модель (но закладывать настройки каждой модели нужно самому вручную).
Так вот, для чего же на практике люди используют дополнительные каналы? Если вы планируете заниматься аэросъемкой, то минимум 2 канала нужно на управление трех-осевым подвесом – канал YAW отвечает за рысканье (поворот вокруг своей вертикальной оси, горизонтальное панорамирование), PITCH – канал тангажа, то есть наклон камеры вверхвниз.
Как правило наклон оси ROLL (горизонта) регулировать не нужно, так как сложно придумать ситуацию, когда на видео нужно нарочно завалить горизонт. Иногда люди используют дополнительную курсовую камеру на сервоприводах, которой вообще можно управлять движениями головы.
СОБИРАЕМ СВОЙ КВАДРОКОПТЕР ЗА 10К! (Часть 1) Дрон DIY AliExpress
Лично я реализовал такое управление своим подвесом с камерой GoPro, которая одновременно является и курсовой и основной камерой. Для этого устанавливается датчик head tracker в видео очки или FPV-шлем (First person view – вид от первого лица), который соединяется с аппаратурой управления, а та в свою очередь передает сигналы на каналы управления нужных осей подвеса камеры.
Для дополнительных каналов управления также можно придумать другие предназначения: от сброса транспортируемых коптером предметов до поджигания фитиля установленных на него ракетниц-фейерверков, тут всё ограничивается лишь полётом фантазии. _ Еще важно разобраться с тем, как мультикоптер работает в целом. Понятно, что при движении стика газа вверх на аппаратуре управления, коптер просто прибавляет обороты на всех двигателях и происходит набор высоты.
Чтобы полететь вбок, аппарат кренится в нужную сторону, увеличивая обороты двигателей с одной стороны и снижая с другой. При этом, за счет датчиков, соединенных с ПК (полётным контроллером), аппарат кренится только до ограниченного в прошивке контроллера угла, чтобы не перевернуться. Вперед и назад летает, соответственно, тем же принципом.
А вот вращение вокруг своей оси происходит за счет того, что двигатели через один крутятся в противоположные стороны и пропеллеры должны быть соответствующие — одни загребают воздух под себя, вращаясь по часовой стрелке, другие — против. Получается, чтобы аппарат развернулся в нужную нам сторону, он увеличивает обороты двигателей вращающихся в одну сторону и ровно настолько же уменьшает обороты двигателей, вращающихся в противоположную. _ Что касается «начинки», то мультикоптер состоит из рамы, на которую устанавливаются двигатели. Сигналы на вращение двигателей идут из полётного контроллера (ПК), но мощности этих сигналов не достаточно, поэтому перед каждым двигателем стоит регулятор оборотов (в простонародье «регуль», ESC).
Что потребуется в самом начале
Если всё-таки есть желание , то для начала следует иметь руки из правильного места, а именно, из плеч. Также хотя бы поверхностные познания в электронике и немного — в программировании, решительность и отсутствие лени и, конечно же, детали по списку.
Ах да, ещё следует определиться с основной функцией дрона. В самом начале лучше делать квадрокоптер без камеры. Нужно набить руку в управлении, чтобы одно из дорогостоящих оборудований не разбилось или утонуло.
Немаловажная деталь для начинающих — место, где вы будете выпускать для полётов свой первый дрон. Городская местность отпадает сразу, так как дома, деревья и провода будут мешать пробным полётам. Парк также не подходит. Одно неправильное движение — пострадать может отдыхающий и ваше новоиспечённое детище. Лучше выйти в чистое поле и рулить квадриком в своё удовольствие.
Список основных запчастей:
- рама;
- моторы с контроллерами для них;
- винты;
- аккумулятор для квадрокоптера и пульта управления;
- полётный контроллер;
- пульт управления с приёмом и передачей сигнала;
- зарядное устройство;
- соединительные провода, болтики и прочее;
- инструменты для работы.
Для того, чтобы в будущем осталась возможность модифицировать беспилотник для работы с видео- и фотосъёмкой, следует основание между лучами коптера сделать пошире, чтобы потом вместить остальные девайсы.
Еще несколько идей для дронов
Но умельцы не ограничиваются только стандартными материалами для создания радиоуправляемых квадрокоптеров — они используют и детали конструкторов лего, и бумагу, и бутылки, и кулеры, самостоятельно создавая чертежи и поэтапно создавая свое устройство.
Квадрокоптер из бумаги
Представьте себе, бывают и бумажные летательные аппараты! Конечно, они не предусматривают серьезных нагрузок, так что создают их просто ради развлечения.
В качестве креплений для бумажных моделей используют клеящий пистолет и стяжки из пластика. Также обязательным элементом становятся маленькие деревянные брусочки — это необходимо для того, чтобы бумага не порвалась стяжками при нагрузках.
Дрон из кулеров
Если у Вас в руках оказались старые кулеры от компьютера — не спешите их выбрасывать! Из них получится прекрасный (хоть и не самый сильный) коптер. Для создания вам понадобятся четыре компьютерных вентилятора и тот же набор материалов и инструментов, что и для обычного дрона — но без моторчиков.
Первый квадрокоптер, как известно, появился в 2006 году. Собрали дрон германские разработчики Бускер и Бусс, причем сделали это сами. И началось: многие инженеры по всему миру загорелись идеей создания собственных моделей квадрокоптера. Есть такие умельцы и сегодня. Хотите собрать свой квадрокоптер и вы.
А иначе стали бы читать сейчас этот материал?
С чего же начать чтоб сделать квадрокоптер своими руками?
Рама. Ее можно сделать без особого труда из пластиковых труб небольшого диаметра, используемых в прокладывании канализационных и иных коммуникаций. Можно изготовить раму из куска фанеры. Понадобится квадрат 110 на 110 мм. Кроме того, потребуется алюминиевый профиль (квадратный).
Лучи (длиной по 495 мм) прикрепляются винтами по обеим диагоналям получившегося квадрата. Возможна покупка готовой рамы (рис. снизу).
Из алюминия невысокого профиля можно сделать посадочные «лыжи» коптера. Из него же можно соорудить держатель для аккумулятора.
. Далее потребуются аппаратура, допустим
Turnigy 9XR
, управляющая плата и аккумулятор для аппаратуры. Плюсом к тому необходимо приобрести силовой Li — Po аккумулятор (для самого квадрокоптера), пропеллеры, устройство для подзарядки аккумуляторов.
. Первым делом устанавливается управляющая плата — в центральную часть платформы из получившегося куска фанеры или карбона. Делается это в пазы, непосредственно просверленные в алюминиевой основе через фанеру.
. Рядом с платой устанавливается приемник (можете сделать это при помощи суперклея). Далее сверлятся отверстия для крепления двигателя. При этом нужно учитывать, чтобы расстояние от края до оси во всех четырех случаях было равным.
. Затем необходимо сделать «паука» из проводов — от регуляторов скорости. Проводку требуется соединить параллельно с помощью соответствующих переходников. Разъемы при этом можно использовать в том месте, в котором подключается аккумулятор к «пауку».
. Все требуется спаять, сделать термоусадку, подключить провода (сигнальные). Для начинающих это будет большой проблемой.
. Можно тестировать получившийся квадрокоптер. Умельцы, которым уже доводилось успешно собирать квадрокоптеры, советуют не экономить на комплектующих. Особенно важным это замечание является сейчас, когда на рынке представлено немало различных микроприборов, в том числе контроллеров и датчиков. Каждый может использоваться при собственноручном производстве дрона, но не каждый может оправдать ожидания разработчика.
Самый простой вариант — приобрести готовую плату с уже установленными датчиками (гироскопом, акселерометром, барометром, магнитометром).
Для чего они нужны?
Гироскоп необходим для контроля углового ускорения, акселерометр замеряет гравитацию, барометр отвечает за набранную высоту, а магнитометр — за направление движения. Сегодня на рынке представлены платы, в которых есть также и GPS-принимающие.
Перед сборкой квадрокоптера своими руками советуем ознакомиться с советами профессионалов (тех, кто не раз делал дроны сам), ведь для начинающих это будет не так уж и просто:
- Первый «дрон» не должен быть с камерой для фото- или видеосъемки, он — ваша первая работа, задача которой — взлететь, уверенно держаться в создухе и не сломаться при первом же полете;
- Не гонитесь за масштабами. Лучше построить менее крупный и громоздкий, но рабочий квадрокоптер;
- Старайтесь использовать минимум соединений и дополнительных элементов. Множество датчиков и контроллеров оправдано далеко не во всех случаях,
- Если вы все же решились сделать квадрокоптер своими руками с камерой, то знайте, что для высокого качества картинки потребуется основание более крупных размеров. «Усадить» её на устройство намного сложнее, да и в целом конструкция с ним становится менее устойчивой и крепкой.
Если у вас нет времени на сборку или просто терпения, советуем почитать как сэкономить и где выгоднее купить квадрокоптер
.
Ввиду развития технического прогресса фотографы, видеографы и блогеры все чаще используют в своем арсенале квадрокоптеры. При этом цены на нормальную модель начинаются от 30 000 руб. Кроме того пользователи часто желают установить на него свою камеру, а не далеко не все подвесы популярных моделей это позволяют.
Поэтому актуальным остается вопрос, как сконструировать квадрокоптер своими руками. Сделать это несложно, если у вас есть хотя бы базовые знания в электрике, но нужно знать определенные нюансы и тонкости. Пошаговую инструкцию по сборке квадрокоптера своими руками читайте далее в статье.
Источник: veselointeresno.su
Самодельный FPV квадрокоптер. Часть 1. Покупка всего необходимго.
Почитав на хабре статьи про самодельные квадрокоптеры и после того как я увидел видео снятое с AR.Drone в планах на будущее появилась идея сделать самодельный FPV квадрокоптер, AR.Drone не устраивал ценой в 350$ примерно(я тогда еще не знал что свой получится куда дороже), тем что радиус действия небольшой, нестабильностью вне помещений,и то что он не open source и я не могу влиять на алгоритм его работы.
С тех пор прошел примерно год, за это время я практически на занимался ничем связанным с Arduino и прочей электроникой, хотя понемногу покупал разные электронные штуки интересные.
И вот буквально недавно оказалось что один из моих знакомых решил собирать квадрокоптер, и я решил что пора и мне.
Требования к квадрокоптеру: FPV(first person view(вид от первого лица)) то есть управление с земли не смотря на модель, а смотря только на экран, fail safe — в случае потери сигнала от пульта нужно чтоб он не падал комом, а спокойно сел, или летел к месту взлета. GPS — достаточно интересно запрограммировать какую-нибудь миссию для него, и смотреть за выполнением. Время полета на одной зарядке > 10 минут. Дальность действия примерно километр.
Список необходимого
GoPro Hero3

GoPro у меня уже была(использовал в качестве мото-видеорегистратора) так что не пришлось тратиться.
ЦЕНА: 300$
Купить GoPro Hero3
Turnigy 9X

Эта легендарная(своей дешевизной, хорошим качеством и функционалом для таких денег) аппаратура радиоуправления у меня тоже была куплена заранее, но я ей еще не пользовался, лежала пылилась.
Она поставляется с ресивером и трансмиттером или без них, у меня с ними, но для нашего квадрокоптера нужны будут другие(с fail safe), так что можно купить урезанный вариант, хотя я не жалею о покупке полной версии, т.к. вставить другой приемник сюда не сложно, а цена различается всего на 4$.
Питается она от 12в, которые можно обеспечить 8-ю пальчиковыми батарейками, но лучше использовать LiPo аккумулятор, я немного прогадал с размерами, и мой аккумулятор приходится крепить двусторонним скотчем, но внизу я даю ссылку на аккумулятор который отлично впишется в батарейный отсек. Нужно следить за полярностью (минус слева, плюс по центру) т.к. можно не туда воткнуть и спалить аппу.
По умолчанию она идет без подсветки экрана, поэтому лучше сразу докупать подсветку за 5$.
И прошивка с которой она поставляется оставляет желать лучшего(я сам не в курсе, но очень многие прошиваются на прошивку ER9x, которая проще в понимании и более функциональна) я тоже буду прошивать, даже не попользовавшись стандартной прошивкой, и для этого нужен программатор. Цена: 54+5(подсветка)+10(LiPo)+4(программатор)+24(доставка)=97$
Купить Turnigy 9X
Купить Turnigy 9X (без ресивера и трансмиттера)
Купить подстветку
Купить LiPo
Купить программатор
FrSky DJT 2.4Ghz Combo Pack for JR w/ Telemetry Module V8FR-II RX
LiPo 2200mAh 3S 25C

Аккумулятор который будет стоять в квадрокоптере(еще не купил, закажу вместе с FrSky)
ЦЕНА: 10,68$ + доставка
Купить LiPo 2200mAh 3S
Рама RCT Spider FPV Quadcopter Frame W/ Landing gear

Раму можно конечно сделать самому, но т.к. они не сильно дорогие, и внешне смотрятся очень хорошо, я решил купить. Выбор пал именно на эту т.к. в ней вроде достаточно места для всего что запланировано, и еще останется на будущие доделки, к ней удобно крепить GoPro, и по моему лучи и лопасти не будут попадать в кадр, или будут но минимально.
ЦЕНА: 29$
Купить раму
Пропеллеры 12 Pairs Carbon Reinforced 10×4.5″ Counter Rotating Propellers

Пропеллеры покупал просто дешевые и подходящие по размеру(в инфо к раме написано 9~12″ propeller) к тому же тут есть переходники под разные моторы.
ЦЕНА: 27$
Купить пропеллеры
Моторы 2830/11 1000KV Outrunner Brushless Motor

В моторах особо не разбираюсь, смотрел чтоб к раме подходили (в инфо по раме сказано 28, 35 series motor), такие же моторы купил мой знакомый. Они были разной мощности от 750KV до 1300KV, решил взять середину. ЦЕНА: 11×4=44$
Купить моторы
Контроллеры моторов SK-30A SimonK Firmware Multicopter Speed Controller ESC 30A

Контроллеры такие купил мой знакомый и я тоже их выбрал, чтоб в случае чего вдвоем разбирались решали проблемы. Да и на хабре кто-то хвалил их.
ЦЕНА: 12,5×4=50$
Купить контроллеры моторов
Кабель для контроллеров моторов JST to 4 X 2mm Bullet Multistar ESC Quadcopter Power Breakout Cable

Просто для того чтоб не паять и выглядело симпатично.
ЦЕНА: 2$
Купить кабель для контроллеров моторов
Провода 18AWG Silicon Wire Red (1Meter), 18AWG Silicon Wire Black (1Meter)

Не знаю где в Беларуси можно купить провода нормальные, поэтому на всякий случай заказал красный и черный по 2 метра.
ЦЕНА: 1*2+1*2=4$
Купить красный провод
Купить черный провод
200pcs 10cm 2.54mm 1pin Male to Female jumper

Для подключения датчиков и приемника радиосигнала может пригодиться
ЦЕНА: 10$
Купить Male to Female jumper
20 Pairs 2 mm Bullet Banana Plug Connector

Для подключения аккумулятора и моторов могут пригодиться
ЦЕНА: 3,5$
Купить 2 mm Bullet Banana Plug Connector
Полетный контроллер AIOP V2.0 ALL IN ONE PRO Flight Controller
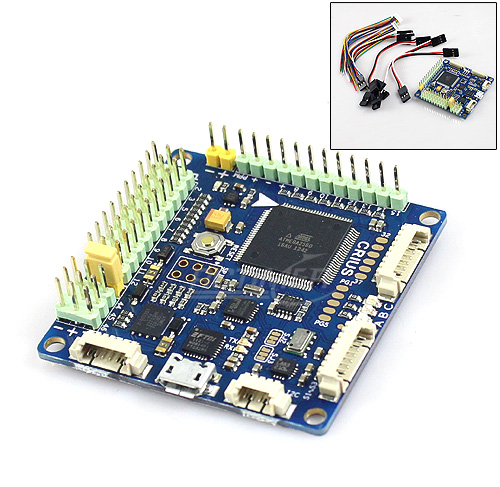
Полетный контроллер покупал такой же как и знакомый, т.к. цена и функционал устраивают. А решать проблемы проще вместе будет.
Планируется ставить на него MultiWii
ЦЕНА: 49$
Купить AIOP V2.0
AIOPIO Board (Input / Output module)

Не знаю что это особо, но т.к. цена не большая и может быть эта штука мне пригодится решил взять. Подозреваю что тут выведены пины дополнительные на которые можно цеплять еще датчики и прочее. И вроде телеметрию на пульт можно будет передавать блягодяря ей и FrSky.
ЦЕНА: 4$
Купить AIOPIO Board
u-Blox CN-06 GPS Receiver V3.0

GPS приемник который поддерживается MultiWii
ЦЕНА: 30$
Купить u-Blox CN-06
Подстилки под платы Gyro / Flight Controller Mounting Pad (10pcs/bag)

Что то типа двустороннего скотча который еще немного вибрации сглаживает.
ЦЕНА: 1$
Купить Flight Controller Mounting Pad
7A UBEC

Т.к. для AIOP нужны 5v а моторы у нас 12 вольтовые, нужно понизить напряжение от 3s аккумулятора до 5 вольт(тот что я купил возвращает 5,25) т.к. читал что AIOP недостаточно 5в(на самом деле сначала купил, а потом заметил что не ровно 5v и начал искать не плохо ли это).
ЦЕНА: 7$
Купить UBEC 7A
Gopro Hero3 USB to AV
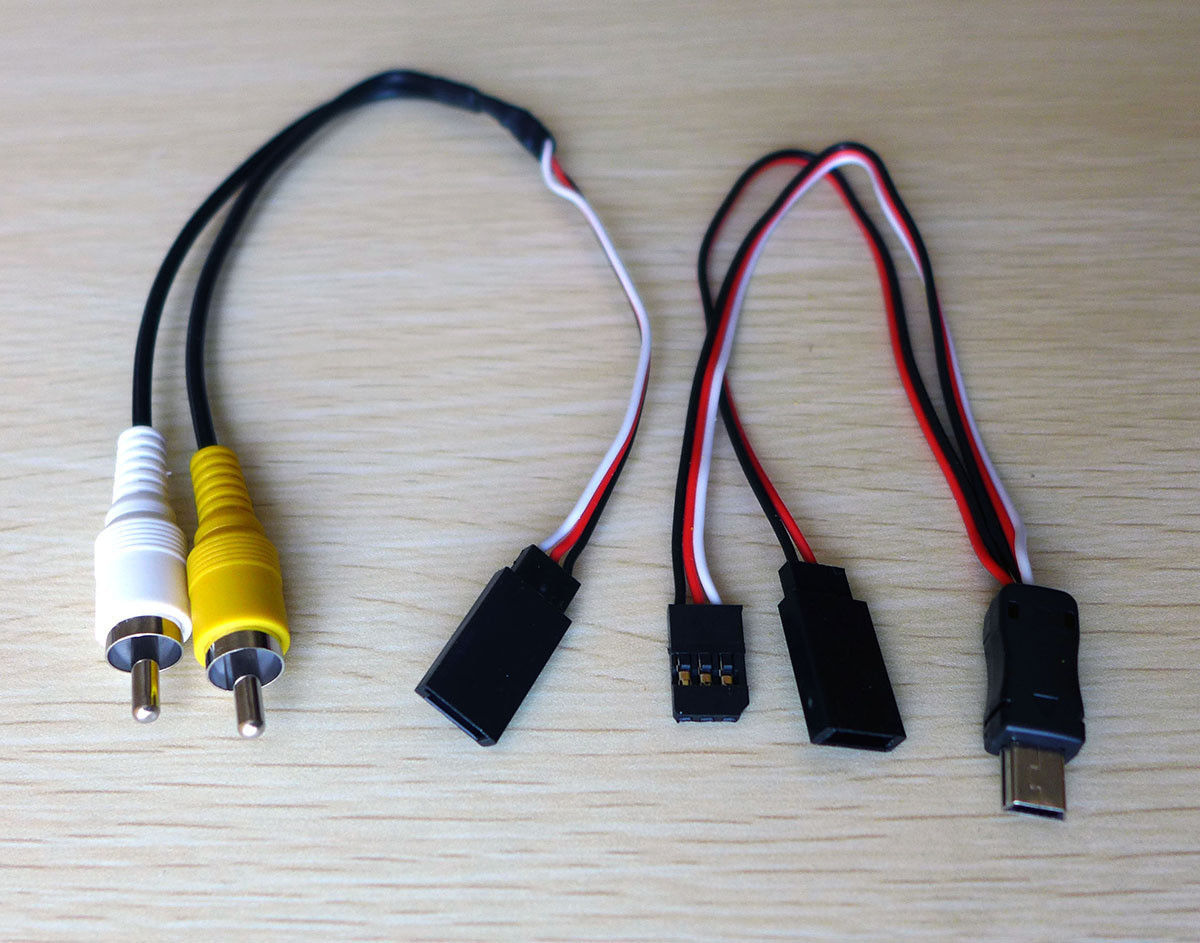
Кабель для приема реалтаймового аналогового видео и аудио сигнала от GoPro.
ЦЕНА: 11$
Купить Gopro Hero3 USB to AV
200mW 5.8G FPV Video Audio Transmitter TX 2KM 2000M + 5.8GHz Rx Receiver

200mW 5.8G передатчик видео и аудио и 5.8GHz приемник. Для получения картинки с камеры на земле в реальном времени.
ЦЕНА: 47$
Купить 200mW 5.8G FPV Video Audio Transmitter TX 2KM 2000M + 5.8GHz Rx Receiver
MAVLink-OSD v1.0
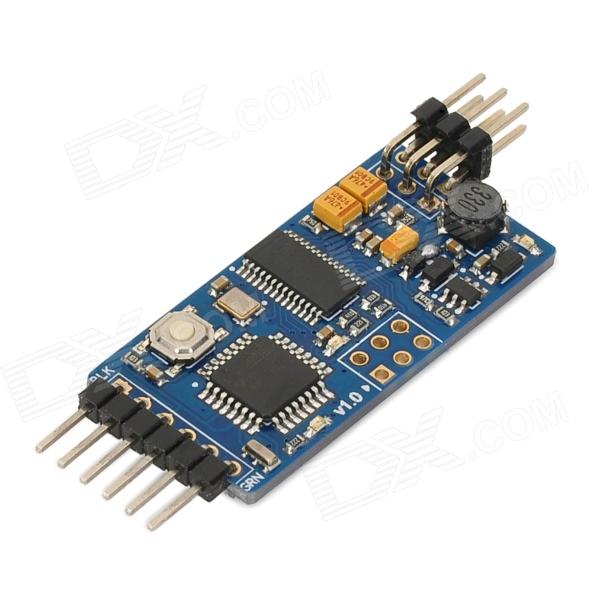
On Screen Display для того чтоб накладывать телеметрию(скорость, высоту, расстояние, заряд аккумулятора) на видео передаваемое на землю поверх картинки с камеры.
ЦЕНА: 21,5$
Купить MAVLink-OSD v1.0
Автомобильный LSD монитор

У меня уже есть. Не знаю сколько он стоит, но средняя цена вроде 40$
ЦЕНА: 40$
Купить автомобильный LSD дисплей
Зарядное устройство
Если у вас нет зарядки для LiPo то придется докупать и ее: Imax B6 + 12v 5a блок питания + доставка = 50$
Итого
Доставка всех товаров с RcTimer где-то 12$
В сумме покупка всего что я перечислил обойдется примерно в 850$
UPD
Квадрокоптер полетел, но я его разбил делая трюки и нет времени сейчас им дальше заниматься, так что цикл статей неизвестно когда продолжится.
Вместо AIOP V2.0 советую покупать APM 2.6, суть та-же, но удобнее упаковано и вообще более продуманная штука.
- Arduino будильник поливающий водой
- Тормозной путь мотоцикла и автомобиля
- Отзыв-обзор GoPro Hero 3 в качестве мото видеорегистратора
Источник: la2ha.ru
Что нужно, чтобы сделать квадрокоптер своими руками

Для тех, кто впервые занимается постройкой радиоуправляемого многодвигательного летательного аппарата, перво наперво нужно определить список деталей, которые нужны для того, чтобы сделать свой первый квадрокоптер. Очень трудно в первый раз определиться, что нужно купить, какие детали будут работать вместе, особенно если у вас за плечами нет какого либо опыта в постройке или хотя бы в разборке радиоуправляемых игрушек, таких как вертолеты и самолеты.
На форумах полно тем и сообщений, где люди хотят сделать квадрокоптер своими руками, но не знают с чего начать. Очень трудно отфильтровать весь этот поток информации из тысячи постов, блогов и точно понят в итоге, что нужно делать. Так что эта статья как раз для тех, кто находится в такой ситуации. Здесь мы попытаемся дать совет по тем деталям, которые мы сами использовали и проверили при полной сборке аппарата, от начала и до конца, но все же основная цель этого материала — это дать вам общее представление о том, что вам нужно для постройки собственного квадрокоптера. Вот список того, что вам понадобится:
Список основных деталей
- Рама
- Электромоторы 4 шт.
- ESC или электронный регулятор скорости 4 шт.
- Плата управления
- Радио передатчик и приемник сигнала
- Лопасти 4 шт. (2 — для вращения по часовой стрелке и 2 — против часовой)
- Батарея и зарядное устройство для нее
Кроме того вам понадобятся всякие мелкие запчасти, материалы такие как хомуты, двусторонний скотч, проволока, держалка для батареи, перемычки, болтики и т.п., но обо всем по порядку. Нужны будут еще и кое какие инструменты. У вас должен быть паяльник с не сильно толстым жалом и вы должны уметь им пользоваться, отвертка, шестигранные ключи, плоскогубцы, клей или лучше клеевой пистолет. А теперь мы пробежимся подробно по каждой детали в отдельности и дадим уже более конкретные советы.
Рама


В принципе любой летательный аппарат должен иметь в своей основе раму, а если говорить о квадрокоптерах, тот тут это очень критично. При выборе рамы нужно рассматривать три ее характеристики: вес, размер и материал, из которого она изготовлена. Мы рекомендуем использовать DJI FlameWheel F450 или что-то аналогичное. Рама эта сборная и цена ей порядка 20$ (аналоги в районе 15$).
Она прочная, легкая и в ней уже есть PBN (распределительная плата), на которой все можно аккуратно и легко собрать. Так же к ней подходит целая куча разнообразных дополнительный прибамбасов. Если для вас дороговато покупать раму от DJI, то можно найти ее аналог (клон), он будет дешевле, а по качеству мало чем отличаться. Все запчасти и аксессуары 100% совместимы между собой.
Размах крыльев у такого квадрокоптера в итоге будет более 50 см. Достаточно внушительный аппарат получится.
Электромоторы

Для чего нам нужны моторы? А для того чтобы крутить пропеллеры, которые и поднимут нашу птичку в воздух. В интернете можно найти тысячи разнообразных моторов для квадрокоптера от абсолютно дешевых до заметно дорогих. Комплект из 4-х достойных моторов стоит примерно 30$, но можно конечно найти и гораздо дешевле.
Моторы отличаются по мощности, которая указывается в кВт и чем она больше, тем быстрее он будет вращать свой пропеллер при постоянном напряжении. При покупке электромотора посмотрите обязательно на то, сколько силы тока в амперах нужно будет иметь на ESC и какой размер лопастей оптимален для данного экземпляра двигателя. Мы советуем начинать с мощности электромотора в 1000 кВт. Так же обратите внимание на тип моторов, они могут быть коллекторными (brushed) и бесколлекторными (brushless). Последние предпочтительнее, т.к. они быстрее, тише, надежнее, проработают гораздо дольше.
ESC — электронный регулятор скорости

ESC отвечает за то, с какой скоростью крутится электромотор в конкретный момент времени. Вам таких штук надо 4, по одному на каждый мотор. А сам регулятор ESC уже подключается напрямую к батарее проводами или через плату управления.
Большинство этих регуляторов идут со встроенным BEC (Блок Исключения Батареи или регулятор со встроенным стабилизатором напряжения, а проще говоря «стабилизатор»), который позволяет запитывать такие вещи как плата управления полетом и радиоприемник без прямого их подключения к источнику питания, т.е. батарее. Наличии в конструкции регулятора скорости (ESC) крайне важно, т.к. он задает точную скорость вращения для каждого мотора, а все они должны вращаться с одинаковой скорости, чтобы обеспечить стабильность квадрокоптера в воздухе. Сейчас принято, при построении мультироторных аппаратов, использовать регуляторы с прошивкой SimonK. Она меняет частоту его обновления таким образом, чтобы мотор получал от него больше команд в секунду, тем самым повышая точность и управляемость летательного аппарата. Комплект из 4-х ESC с прошивкой SimonK стоит примерно 25$.
Полетный контроллер

Плата полетного контроллера — это мозг квадрокоптера. На ней располагаются важные датчики такие как гироскопы и акселерометры, которые отвечают за скорость вращения каждого электромотора. Платы эти могут быть простыми и очень сложными и соответственно дорогими. Мы рекомендуем для первого вашего квадрокоптера полетную плату типа HobbyKing KK2.1.5. или аналогичную Она вполне доступна по цене, что то около 20$, проста в установке и обладает хорошей функциональностью. Она еще хороша тем, что может работать на любом мультироторном летательном аппарате, так что если вам, вдруг, в дальнейшем захочется построить гексакоптер, новый полетный контроллер покупать не нужно будет.
Радио передатчик и приемник (Пульт управления)
![]()
Передатчик и приемник отвечают за управление квадрокоптером. Что конкретно выбирать не так принципиально, главное чтобы у него был 4-х канальные передатчик с KK2.0 управляющей платой. Но лучше все таки покупать 8-ми канальный, он более гибкий для возможных будущих ваших проектов, которые и потребуют больше каналов для связи. Хорошим выбором будет Turnigy 9xR Pro.
Цена его возможно немного кусается, 100$, но он очень функционален, 24-канальный и его можно будет использовать и в дальнейшем для любых радиоуправляемых аппаратов. Универсальная штука. Он очень популярен среди радиолюбителей и пользователей этого пульта очень много, так что всегда можно будет найти ответ на вопрос по настройке или решению какой либо проблемы, т.к. скорее всего то, с чем вы столкнулись уже проходилось кем то другим и готовое решением уже есть.
Лопасти

Квадрокоптеру нужно 4 лопасти, 2 обычных с вращением по часовой стрелке и две «толкающие» с вращением против часовой стрелки. В маркировке толкающие лопасти помечаются буквой «R» после размера. Мы чаще всего используем лопасти с размером 22*12 см. (9*4,7 дюймов). Материал изготовления пластик.
Батарея

На такие летательные аппараты как квадрокоптер устанавливаются чаще всего аккумуляторные батареи типа LiPo. Они могут быть разного размера и емкости. Мы используем батареи типа 3S1P, что означает 3 ячейки соединенных параллельно. Каждая ячейка дает напряжение 3,7В, итоговое напряжение на выходе 11,1В.
Так же у каждой аккумуляторной батареи есть показатель C, который говорит о том, сколько тока она может отдать (её токоотдача), измеряемая в Амперах. И емкость батареи, измеряемая в амперЧасах. И тут есть прямая зависимость между мощностью (емкостью) батареи и её весом, так что тут нужно найти золотую середину между продолжительностью полетом и общим весом летательного аппарата.
Главное правило — удваивая емкость батареи вы получаете лишь +50% к времени полета, но еще нужно учесть сможет ли ваш квадрокоптер поднять в воздух такой вес. Для нашей сегодняшней модели мы рекомендуем брать аккумуляторную батарею с емкостью 3000 мАч. Цена будет что-то около 15$.
Зарядное устройство
![]()
Зарядка LiPo батарей очень сложный процесс, т.к. каждая из них состоит из нескольких ячеек, которые нужно заряжать и разряжать одним и тем же током. У вас должно быть сбалансированное зарядное устройство. На рынке сейчас можно найти кучу подходящих зарядников, но старайтесь избегать слишком дешевых или безымянных, т.к. они могут привести к возгоранию или даже взрыву батареи.
И никогда не оставляйте процесс зарядки LiPo батареи без присмотра. Лучше делать это на несгораемой поверхности. Наша рекомендация — IMAX B6 AC Balance Charger (45$), вполне доступный по цене и надежный.
Выводы
Выше мы описали главные детали и компоненты для постройки квадрокоптера. Конфигураций может быть тысячи и процесс выбора деталей может конечно вас запутать. Попробуйте начать с того, что мы порекомендовали или близкого по значению, аналогичного. Если есть какие либо вопросы, не стесняйтесь, задавайте в комментариях под статьей. Удачи в постройке!
Источник: topdrones.ru