Закончив с механической частью, переходим к электронной. Начнём с пульта дистанционного управления, схема которого показана на рис. 13. Для уменьшения его размеров применён модуль Arduino RF Nano, в котором на плату Arduino Nano встроен приёмопередатчик на микросхеме NRF24L01, который работает на частоте 2,4 ГГц.
Можно применить отдельно плату Arduino Nano и модуль NRF24L01, но тогда для пульта, возможно, придётся применить корпус большего размера, на программу управления передатчиком такая замена не влияет. Выходная мощность передатчика установлена на максимум, приёмник уверенно принимает сигнал на расстоянии до 50 м. Управление реализовано на четырёх кнопках.
Включается пульт кнопкой SB1, которая через резистор R3 открывает транзистор УТ1 с подачей питания на плату управления. Модуль A3 высоким уровнем напряжения на выводе А1 открывает транзистор VT2, который блокирует кнопку SB1, обеспечивая работу передатчика на заданное время — около 20 с, после чего микроконтроллер автоматически выключает питание пульта управления.
Автоматические ворота своими руками — Автоматика с Алиэкспресс — Часть 4
Но если была нажата одна из кнопок управления, время отключения продлевается ещё на 20 с. При включении питания загорается светодиод HL1, который мигает при нажатии на любую из кнопок управления. По командам от кнопок SB2 («Закрыть»), SB3 («Открыть») и SB4 («Стоп») микроконтроллер модуля А3 по внутренней шине SPI передаёт соответствующие команды на микросхему-передатчик NRF24L01.
Также микроконтроллер этого модуля контролирует напряжение аккумулятора и при его снижении до 3,2 В включает-выключает светодиод HL1 с периодом 1 с. Заряжается аккумулятор через модуль A1 через разъём USB-micro, расположенный на плате этого модуля. Модуль А2, повышающий напряжение аккумулятора до 8 В, обеспечивает стабильную работу модуля А3.
При снижении напряжения питания до 3,5 В модуль Arduino RF Nano отказывался работать. Собран пульт управления на макетной плате размерами 81×46 мм (рис. 14), монтаж проведён проводом МГТФ-0,12. Плата размещена в корпусе размерами 85x50x20 мм (рис. 15), приобретённом в Интернете.
Аккумулятор может быть любой Li-Ion подходящих размеров.
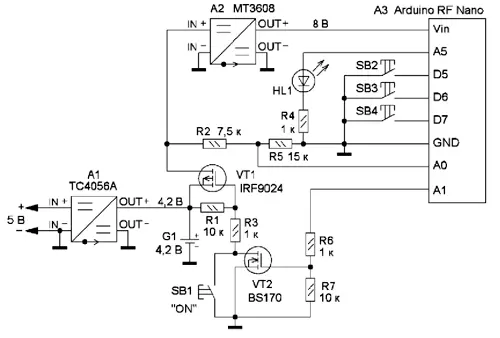
Рис. 13. Схема пульта дистанционного управления

Рис. 14. Макетная плата пульта управления
Рис. 15. Корпус для платы
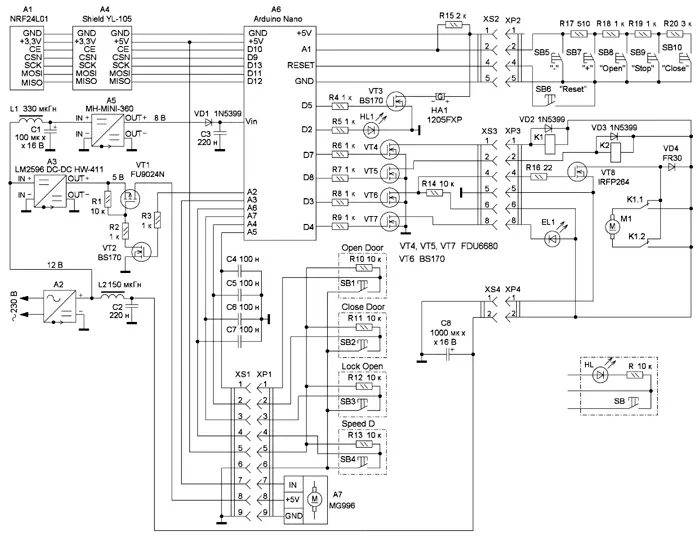
Рис. 16. Схема модуля управления (по клику крупно)
«Мозгом» блока управления приводом ворот (рис. 16) является модуль Arduino Nano и несколько модулей ему в помощь. Управление производится с помощью кнопок, установленных в блоке управления, а также с дистанционного пульта по радиоканалу на частоте 2,4 ГГц.
При отсутствии или неисправности блока радиоканала NRF24L01 функция управления по радиоканалу исключается, и управление осуществляется только с помощью кнопок. Для быстрого отклика на команду передатчика программа зациклена только на работу с приёмником, и при получении команды управления от передатчика программа выходит из этого цикла и выполняет полученную команду и снова зацикливается до получения следующей команды.
Кроме автоматического режима открытия и закрытия ворот, реализован ручной режим управления воротами тремя кнопками: SB8 — Open («Открыть»), SB9 — Stop («Стоп») и SB10 — Close («Закрыть»), а также режим плавного довода ворот. При включении режима Open или Close автоматика плавно увеличивает скорость движения ворот до заданного значения и в конце по сигналу с датчика доводчика плавно уменьшает скорость движения ворот до срабатывания датчика крайнего положения. Скорость открывания/закрывания ворот можно уменьшать или увеличивать с помощью кнопок SB5 и SB7 «+» соответственно и сохранить в EEPROM МК, нажав на кнопку Stop. Также скорость можно изменить после трёхкратного нажатия на кнопку Stop, при этом загорается светодиод HL1, сигнализирующий, что теперь кнопками SB5 и SB7 «+» можно изменять скорость доводчика и сохранять эти изменения, нажав на кнопку Stop, после чего светодиод выключается.
При срабатывании датчика открытия ворот начинает мигать светодиодный фонарь EL1 с периодом 1 с. Фонарь устанавливают на улице для индикации открытия ворот. Для управления скоростью вращения электродвигателя применён режим ШИМ (широтно-импульсной модуляции). С вывода микроконтроллера D3 ШИ-сигнал поступает на транзистор VT6, затем на транзистор VT8, которые усиливают его по мощности. Любое нажатие на кнопки или изменение режима работы сопровождается акустическим сигналом излучателя НА1, причём срабатывание концевых датчиков — три раза, остальные режимы — один раз.
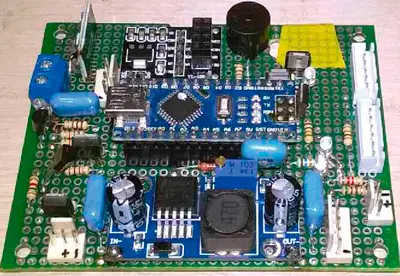
Рис. 17. Плата блока управления
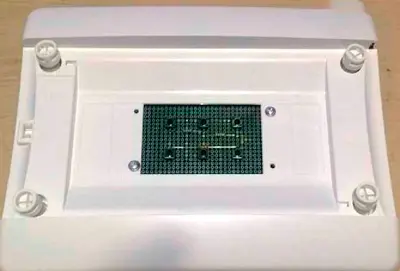
Рис. 18. Плата с кнопками
Также на плате с кнопками присутствует кнопка Reset для перегрузки микроконтроллера. В случае зависания программы сторожевой таймер (WDT) автоматически перегрузит микроконтроллер. Размеры платы блока управления — 90×70 мм (рис. 17), платы с кнопками — 90×45 мм (рис. 18).
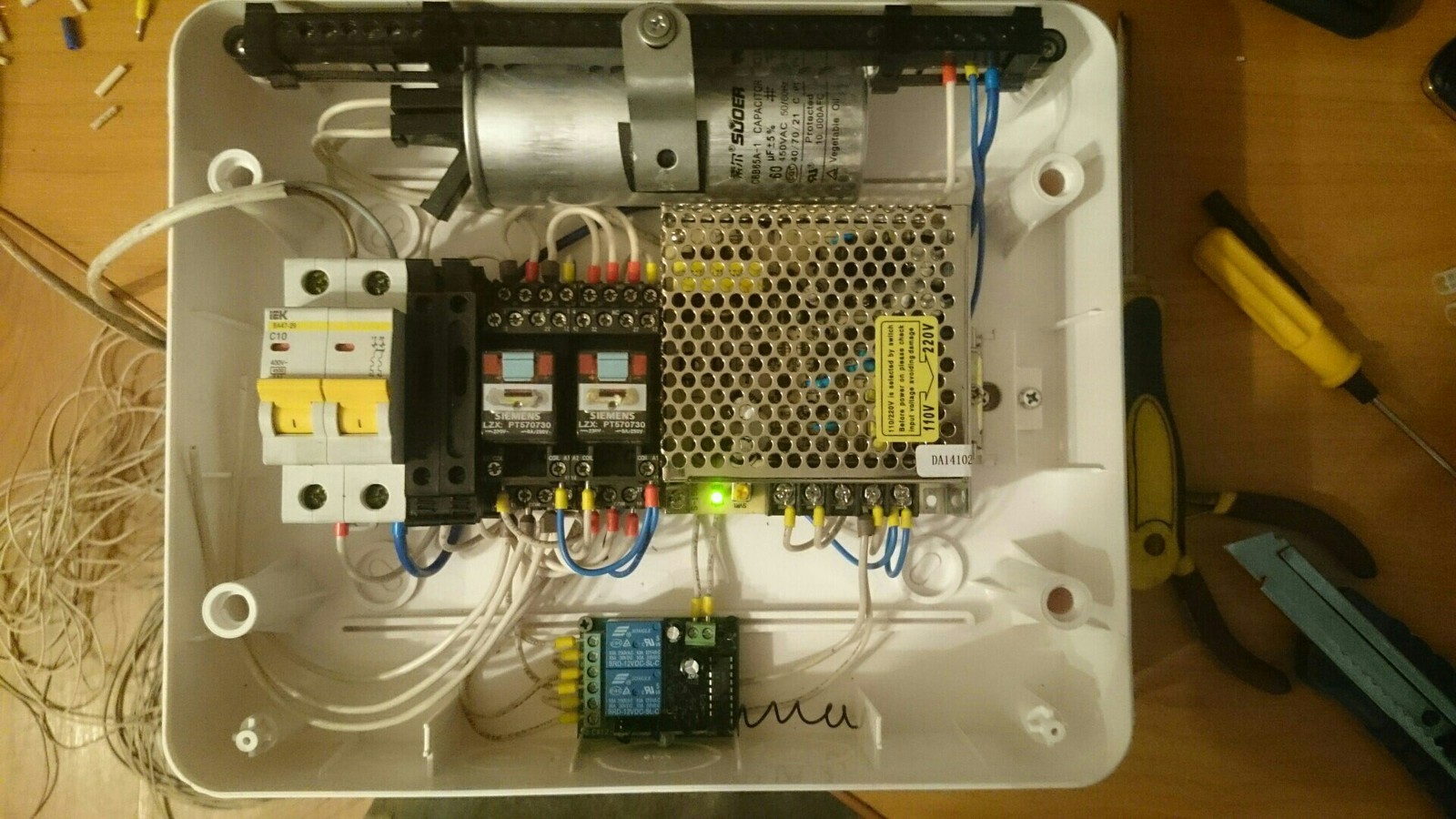
Использованы монтажная плата и проводной монтаж (провод МГТФ-0,12). Вся электроника блока управления смонтирована в электромонтажной коробке на восемь автоматов (рис. 19). Для подключения датчиков и электродвигателя можно применить любые подходящие разъёмы, обеспечивающие потребляемый узлами ток (рис. 20).
Транзистор VT8 установлен на теплоотводе рядом с электродвигателем. SB1-SB4 — это контакты датчиков положения двери, о них было сказано выше. При необходимости датчики можно снабдить светодиодами, для этого их надо собрать по схеме, показанной на рис. 16 справа внизу.
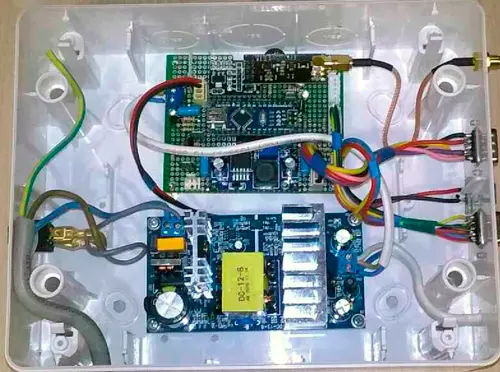
Рис. 19. Монтаж блока управления
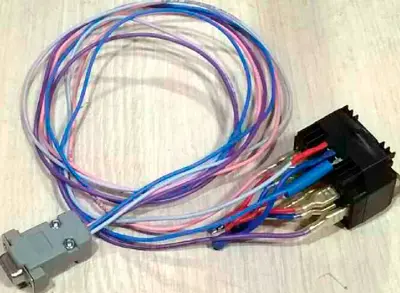
Рис. 20. Разъемы для подключения
Поскольку для питания модуля А1 NRF24L01 требуется 3.3 В, а Arduino Nano от своего встроенного стабилизатора напряжения 3,3 В не может обеспечить его стабильную работу, модуль NRF24L01 запитан через модуль А4 Shield YL-105, в котором находится понижающий стабилизатор напряжения на 3.3 В. Для питания сервома-применён отдельный понижающий преобразователь напряжения А3 (LM2596 DC-DC HW-411), поскольку стабилизатору напряжения модуля Arduino Nano не хватает мощности для работы сервомашинки. Питание на неё подаётся через ключ на транзисторе VT1, включаемый транзистором VT2 по команде с выхода А2 модуля А6. Модуль А2 — понижающий импульсный блок питания с выходным напряжением 12 В и током нагрузки до 8 А.
Модуль Arduino Nano управляет приёмником и принимает от него три команды управления по последовательной шине SPI. По командам управления и по состоянию четырёх датчиков контроля этот модуль управляет выходными устройствами, приводом ворот и центральным замком.
Поскольку с начала разработки не было полного представления, что может понадобиться для реализации проекта, было решено собирать всё на макетных платах, чтобы по мере возникновения проблем их можно было бы устранять добавлением новых модулей или их заменой. В результате всё с трудом разместилось на плате с первоначального выбранными размерами.
Можно применить постоянные резисторы МЛТ, оксидные конденсаторы — К50-35, неполярные — плёночные К73-17 или аналоги иностранного производства. Полевые транзисторы можно заменить любыми, лишь бы подходили по мощности. Реле К1 и К2 — с номинальным напряжением обмотки 12 В, тип 75.3777 (от «Жигулей») или аналогичные. Следует отметить, что механические датчики положения ворот несложно заменить ИК-датчиками приближения, доработки схемы управления при этом не потребуется. Однако практика показала, что в холодное время года ИК-датчики могут работать неустойчиво.
Передатчик в настройке не нуждается, а в приводе ворот настраивают датчики крайних положений ворот и доводчика на срабатывание. При первом включении данные скорости движения ворот и доводчика автоматически записываются в EEPROM микроконтроллера, если там уже были внесены какие-то данные, для записи значений скорости движения ворот и доводчика в EEPROM модуля Arduino Nano надо внести изменения в скетче в функции SETUP после строки EEPROM_Read(); разблокировать строку Limit_PWM[1] = 255; и после программирования и запуска программы заблокировать эту строку и снова прошить Arduino Nano, или с помощью кнопок в блоке управления отрегулировать скорость вращения мотора, если с EEPROM читается код 255, мотор вращаться не будет. Антенна приёмника вынесена с помощью удлинителя (ВЧ коаксиального кабеля) длиной 2 м за пределы металлической конструкции гаража. Все библиотеки, которые применены в программах, можно загрузить с сайта GitHub.
Скетчи и некоторые вспомогательные файлы находятся здесь.
Видеофайлы, иллюстрирующие работу устройства, находятся здесь.
Рекомендуем к данному материалу .
Мнения читателей
Нет комментариев. Ваш комментарий будет первый.
Источник: www.radioradar.net
Привод для откатных ворот своими руками. (Фото+Видео)
Здесь я писал об откатных воротах своими руками. Захотелось большего, а именно сделать привод для откатных ворот своими руками.
Иркутские фирмы предлагаю минимальный набор за 14 000 руб. Такая цена с подвигла меня на создание привода и автоматики своими руками.

Пока шла сигналка, купил в качестве привода ворот двигатель стеклоочистителя ВАЗ 2108

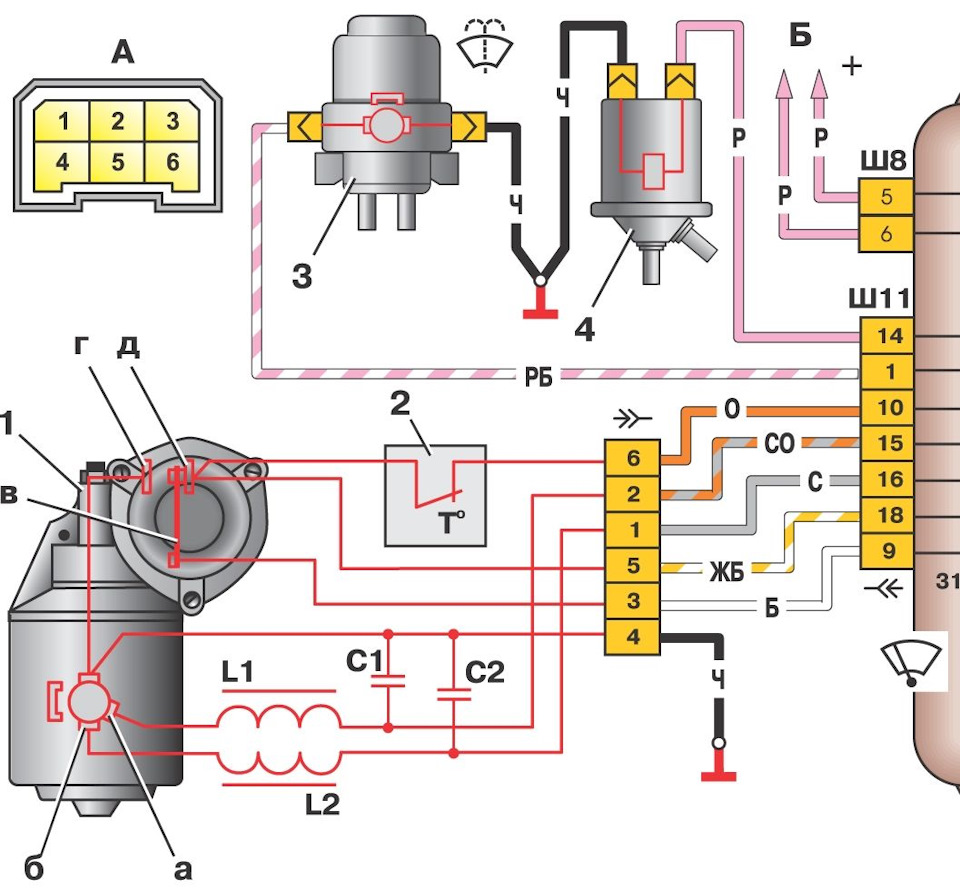
Коннектор привода состоит из 6 контактов. Вам нужно выделить те два провода которые отвечают непосредственно за вращение двигателя. Я эсперементировал менал подключения и в результате нашел что нужно. Что бы не сгорел двигатель когда выбудете искать нужные провода подключайте питание через предохранитель 5А. Меня он пару раз выручал)))) Также можете воспользоваться этой схемой подключения привода стеклоочистителя ВАЗ 2108.
Будьте внимательны у купленного мной привода оказались провода другого цвета пришлось искать нужные контакты эмпирическим путем.
Купил три пяти контактных реле 12v, 4 диода, предохранители.
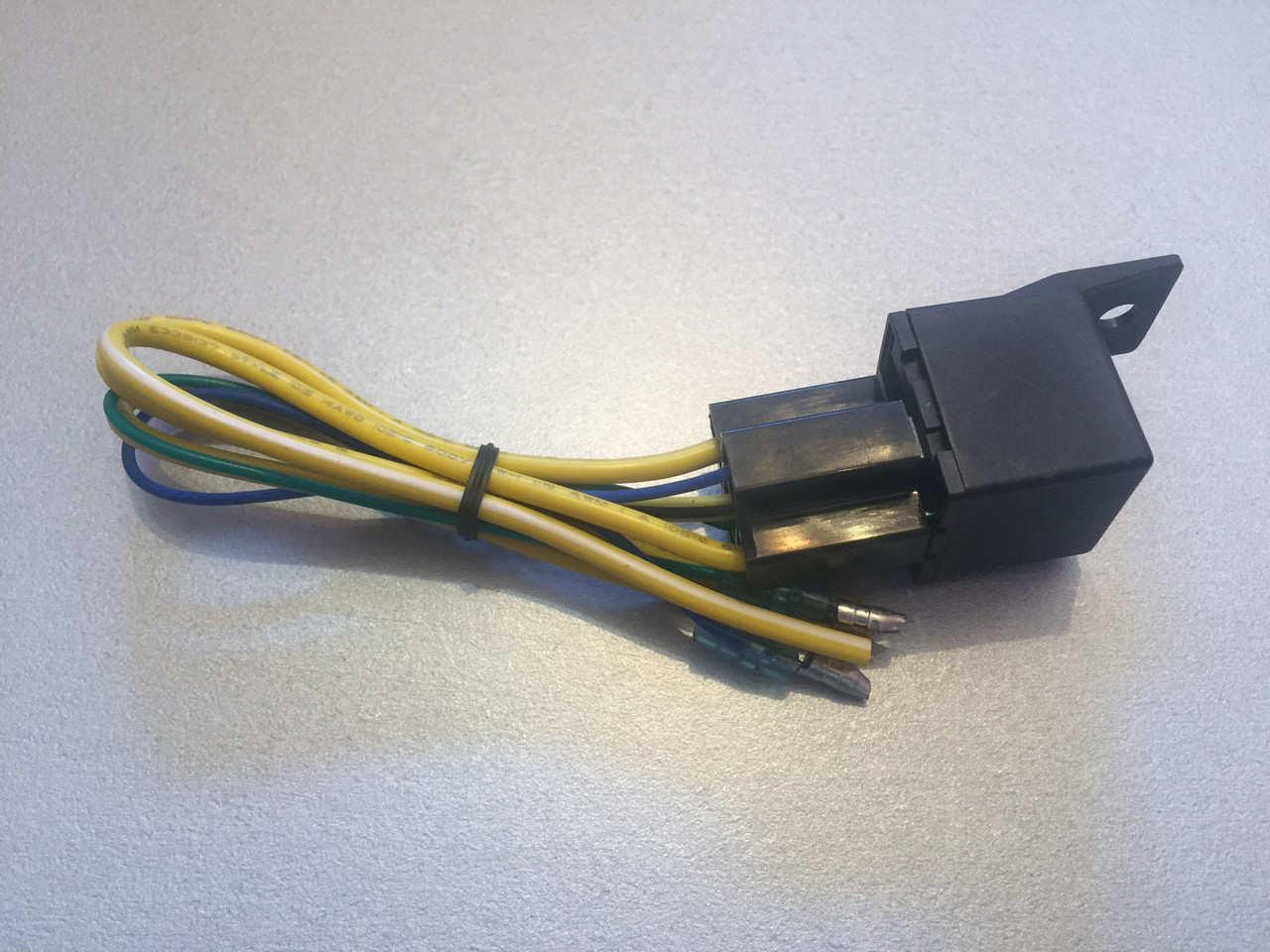
Ниже представлены назначения контактов автомобильного реле

Ниже видео с демонстрацией работы собранной автоматики для откатных (сдвижных) ворот.
Схема подключения автоматики привод для откатных ворот

Двигатель для привода ворот
Привод с концевиками (пробный вариант).
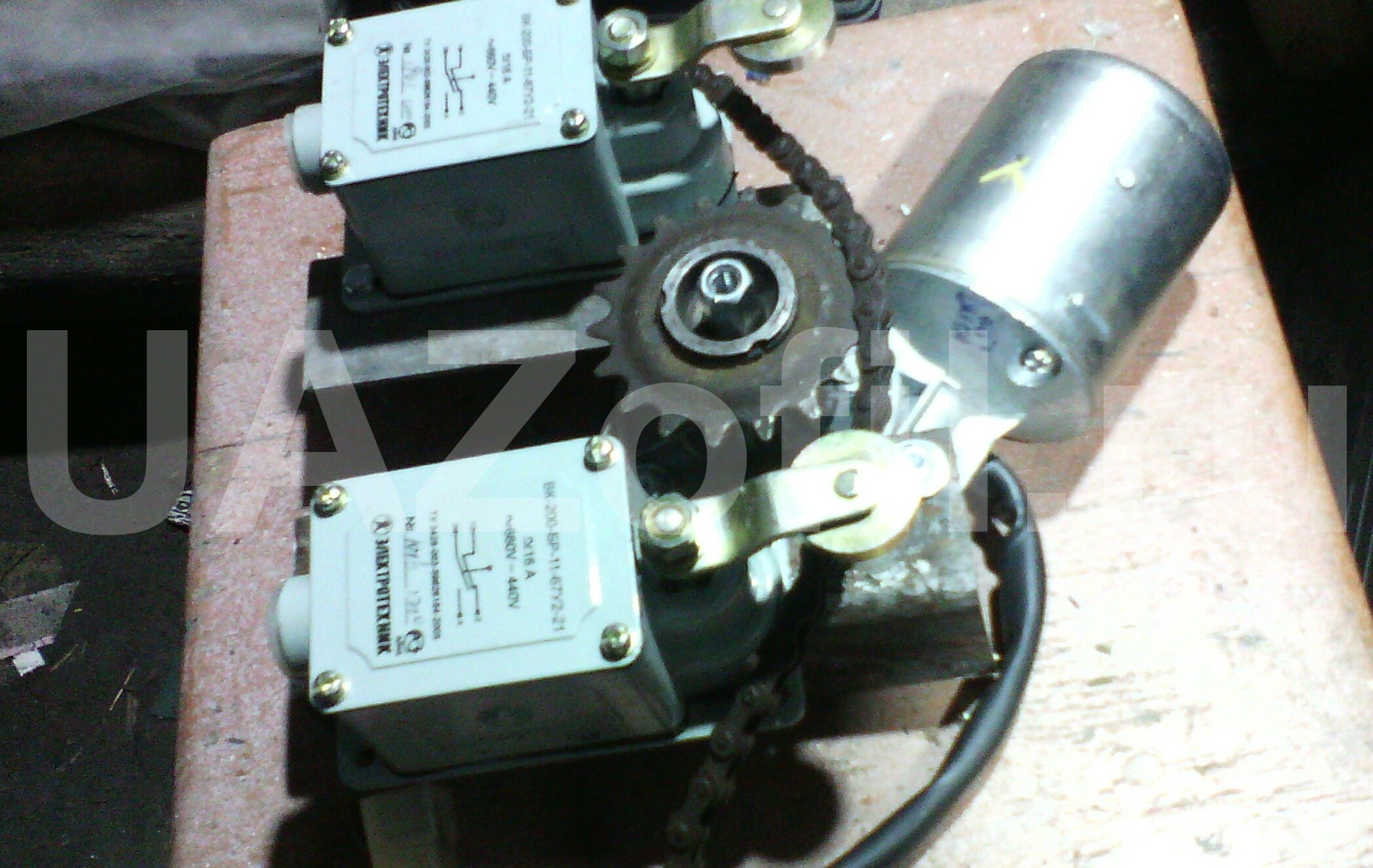
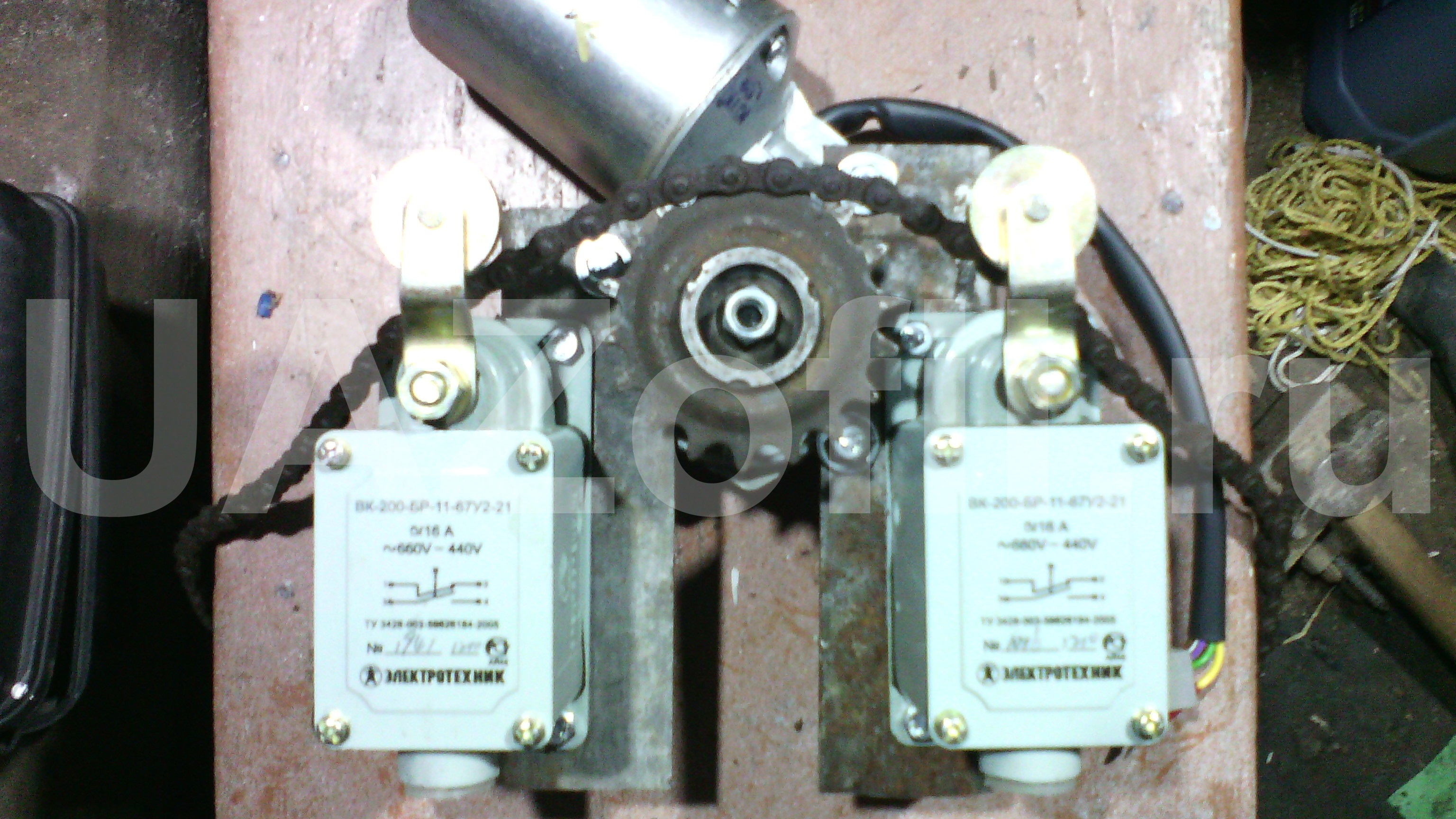
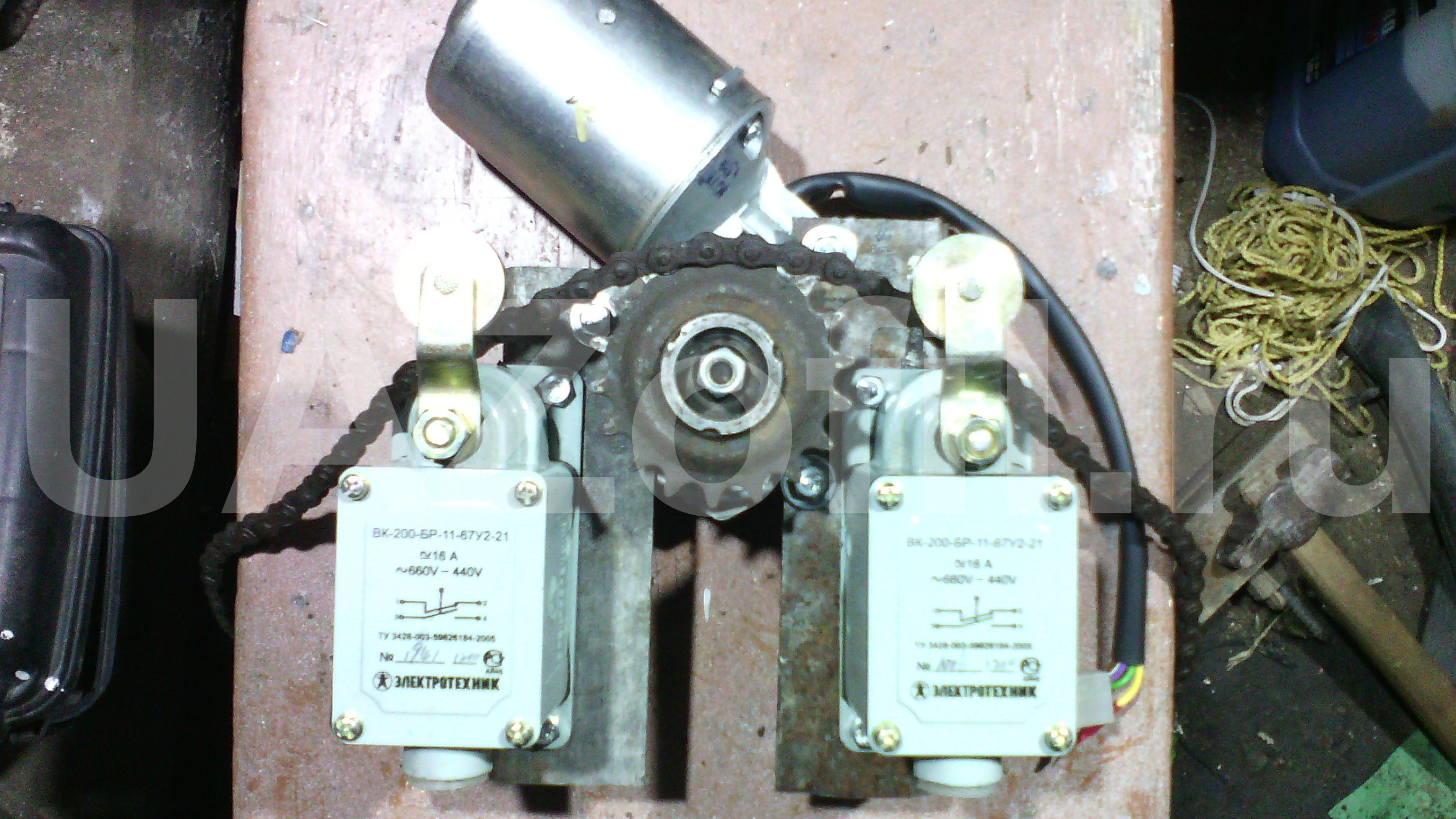

Итоговый вариант привода откатных ворот своими руками.

Слева блок управления, справа двигатель и концевики. Часто в интернете встречаются варианты с автомобильными концевиками но это не надежно. Поэтому для привода ворот я использовал промышленные концевики (концевой выключатель) по 200 руб каждый.



Электропитание откатных ворот
Так как я проживаю в сельской местности и отключение электроэнергии обычное дело было решено использовать аккумулятор и бесперебойник в качестве зарядного устройства. Такая комбинация дает хорошую автономность привода откатных ворот (работа до 2 суток). Отключения электроэнергии не страшны.

Итоговая стоимость.
Автоматика (центральный замок) 450 руб.
Двигатель привода дворников ВАЗ 2108 1500 руб.
Концевики 2 шт. 400 руб.
Мелочи по электрике ( предохранители, реле, термоусадка) 600 руб.
Цепь велосипедная Урал 3 шт. 900 руб.
ИТОГО: 3850 руб.
В итоге сэкономлено более 10 000 руб.
Вопросы задавайте в комментариях.
Источник: uazofil.ru
Как делается автоматика для откатных ворот своими руками

Автоматика для откатных ворот, которой дополнительно можно оснастить любые модификации ворот, позволяет управлять всеми действиями с пульта дистанционного управления. Давайте рассмотрим более подробно варианты и схемы подключения автоматизации ворот.
Откатные ворота, или, как их еще называют, сдвижные ворота, являются конструкцией, в которой одна или две ставни сдвигаются вдоль неподвижной стены или забора по специальным полозьям. Для их открытия требуется минимальное пространство, что позволяет использовать их даже в ограниченном пространстве.
Сложность монтажа таких систем заключается в правильной регулировке полозьев на фундаменте, а специальные регулировочные площадки позволяют выполнять открытие плавно и равномерно. Комплект автоматики для откатных ворот может отправлять команду на открытие с пульта дистанционного управления, при подъезде к ним. Это очень удобная опция, особенно в холодное или дождливое время года.
Автоматика для откатных ворот
Комплект автоматизации откатных ворот включает в себя:
- двигатель привода;
- система фотоэлементов;
- сигнальная лампа;
- антенна приема сигнала;
- блок управления.
Двигатель привода выполняет основную роль в открытии ворот, так как по команде с блока управления выполняет открытие либо закрытие ворот. Двигатель, как правило, используется маломощный на напряжение питания 220 вольт. Для усиления передачи крутящего момента применяется чаще всего червячный редуктор. Схема подключения двигателя гарантирует его работу в реверсивном режиме.
Система фотоэлементов сдвижных либо раздвижных ворот обеспечивает блокировку их работы, если в зоне действия лучей находится препятствие. Такая несложная конструкция является лучшим гарантом от преждевременного срабатывания механизма ворот. Монтаж и настройка данной системы должна выполняться профессионалами.

Сигнальная лампа применяется для оповещения жителей о том, что ворота находятся в движении, и будет происходить въезд или выезд автомобиля. Обычно устанавливается проблесковый маячок оранжевого цвета. Автоматика производит включение и выключение сигнальной ламы по командам с блока управления.
Антенна приема сигнала устанавливается на столб ворот, для обеспечения качественной связи на длинные дистанции. Радиус действия данной антенны может измеряться сотнями метров и позволяет своевременно передать сигнал на открытие или закрытие ворот.
Блок управления принимает и преобразует полученный радиосигнал и при соответствии всем условиям начинает передавать команды на двигатель. Кроме того, блок управления контролирует систему фотоэлементов и сигнальную лампу. Монтируется подобный блок в герметичный контейнер, для избегания попадания атмосферных осадков.
Автоматика для откатных ворот своими руками
Для создания автоматических ворот своими руками начинать нужно с электрического привода. В нем важным элементом является электрический двигатель асинхронного типа. Если напряжение питающей сети трехфазное и позволяет использовать двигатель на 380 вольт, лучше остановиться на нем. Большим плюсом является возможность соединения по типу звезды, которая обеспечит простейший пуск двигателя и использует с максимальной эффективностью ресурсы электродвигателя.
В случае отсутствия питающей сети на 380 вольт, возможно использование электродвигателя на напряжение питания 220 вольт, с запуском через систему конденсаторов. Мощность электродвигателя берется в пределах от 1 до 2,5 кВт. Наиболее распространены в этом качестве крановые электродвигатели с частотой вращения 500-1000 об/мин.
Следующим важным моментом при изготовлении идет зубчатое колесо привода. Его вращение не должно превышать 100 об/мин, что регулируется применением одноступенчатого редуктора, который обеспечивает простоту и надежность преобразования крутящего момента с электродвигателя. Для состыковки электродвигателя с редуктором применяются специальные жесткие или полужесткие муфты.
Заменить редуктор поможет ременная передача. При этом для того чтобы правильно определить передаточное значение, размер большого шкива, установленного на приводное колесо, разделяется на размер меньшего, находящегося на валовой части мотора.
Далее устанавливаются выключатели концевого типа. Для их фиксации на поверхности рейки используют болты. Выделяют два варианта выключателей:
- Магнитные.
- Механические.
Первый вариант отличается большей эффективностью работы, так как данные выключатели работают даже при неблагоприятных погодных условиях. Магнит устанавливается на рейку с зубьями, проходя определенный участок на воротах через крюк, начинает срабатывать.
Подключать электрический привод необходимо согласно инструкции от производителя. Для дополнительных настроек используется дистанционный пульт управления. Кроме того, дополнительно устанавливаются фотоэлементы, которые улавливают световые сигналы. Фотоэлементы должны быть закреплены друг напротив друга. Они могут устанавливаться на ранее обустроенные столбы.
Для того чтобы подключить провода, соорудите в трубе отверстие и проведите их от источника электроснабжения.
Вывод из данного обзора можно сделать такой, что лучшая идея по запуску раздвижных ворот – это обращение в специализированную фирму, которая производит строительство домов, строит бани сауны и бассейны. Специалисты смогут точно рассчитать и залить фундамент, для которого требуется арматура. Кроме того, в магазине обычно сложно приобрести определенные детали и механизмы отдельно. А компания сможет выполнить все работы по ключ, с определенной гарантией. В этом случае ваши ворота прослужат долго и качественно.
Источник: zaborspec.ru