Уход за сложным техническим устройством не слишком сложен, поэтому с ним справится даже неподготовленный человек. Перед очисткой устройства его следует разобрать.
Прежде всего, отсоедините устройство от источника питания. С устройства снимите крышку, вытащите поддон для сбора пыли. Затем поверните пылесос колесами вверх, открутите винты и снимите боковые щетки. Затем выкрутите винты, удерживающие защитную крышку. Извлеките аккумулятор и щетку.
В работе самое главное — выполнять все действия аккуратно, чтобы не повредить детали. Колеса снимаются вместе с блоками. Наконец, снимите элемент, который помогает вращать робот-пылесос. После разборки устройства приступайте к очистке деталей.
Разборка робота-пылесоса
Для очистки или мелкого ремонта, замены важных компонентов может потребоваться разборка. Сразу отметим, что снять фильтры, щетки или датчик не так сложно, как кажется на первый взгляд.
Следует отметить, что устройства, находящиеся на гарантии, лучше вернуть в сервис. Это позволит вам избежать повреждения устройства и выполнить гарантийные обязательства поставщика.

Демонтаж и техническое обслуживание переднего колеса робот-пылесоса Xiaomi Mi Robot Vacuum
Если владелец электронного помощника уверен в своих знаниях и навыках, можно попробовать справиться с возникшими проблемами в работе автономного пылесоса самостоятельно.
Разбор корпуса устройства
Сначала откройте крышку и открутите два винта под ней, как показано на фото.
Второй шаг — открыть маленькую крышку и открутить остальные винты.
Затем можно снять часть пластикового корпуса и добраться непосредственно до самого лидара.
Эта часть демонтажа корпуса завершена. Далее приступаем к разборке лазерного дальномера.
Разборка лазерного дальномера
Сам лазер расположен напротив оптического датчика. Лазер выполнен в виде золотой гильзы с тремя проводами. Провода подключаются через 3-контактный разъем к плате лидара. Чтобы извлечь лазер, нужно открутить все черные винты.
Мы рекомендуем использовать для замены только оригинальный лазер, так как при использовании неоригинального лазера могут возникнуть проблемы (недостаточное сопротивление диода). Это может привести к проблемам с поиском док-станции и неправильному отображению виртуальной карты комнаты!

После замены лазера его необходимо откалибровать! Для этого нужно направить робот-пылесос Xiaomi на базу после частичной сборки и посмотреть, быстро ли он ее найдет.
Разбор корпуса LDS

- Сначала я снял переднюю верхнюю панель корпуса. Для этого потребуется небольшая отвертка или специальный инструмент. Панель крепится к корпусу с помощью девяти защелок.
- Его следует снимать очень осторожно, чтобы не повредить детали. Осторожно вставьте отвертку под край панели и отсоедините крепежные элементы.
- На обратной стороне крышки вы увидите девять защелок, с помощью которых она крепится к пылесосу.
- Затем снимите крышку пылесборника. Для этого выкрутите шесть саморезов, крепящих поворотные панели.
- Выкрутите шесть винтов, крепящих крышку лидара. Три из них скрыты под резиновыми колпачками, которые необходимо снять, не повредив корпус. Это можно сделать с помощью пинцета. Снимите крышку лазерного дальномера, под которой находится его корпус.
- Чтобы снять лидар, открутите четыре крепежных винта. Теперь вы можете осторожно извлечь датчик из корпуса.
- Под лазерным дальномером виден разъем, с помощью которого лидар подключается к материнской плате.
- Отказы датчиков могут быть разными. Не всегда требуется замена всего датчика. Возможно, будет достаточно удалить некоторые компоненты и установить новые.
Замена двигателя
Далее я покажу вам, как заменить мотор лидара в Xiaomi Roborock. Чтобы разобрать его, необходимо снять приводной ремень, открутить два самореза. Это следует делать очень осторожно, резьбу этих винтов легко сорвать.
Теперь отсоедините деталь от корпуса, отсоединив разъем. Будьте осторожны, чтобы не повредить гнездо подключения двигателя.
Кроме того, я снял верхнюю крышку лидара, чтобы посмотреть, что у него внутри. Для этого я открутил три винта, удерживающие крышку.

Внутренняя часть датчика также может быть изменена. Это касается и самого лазера, но его переустановка требует специальных навыков и знаний. Это будет непросто сделать неподготовленному пользователю. Я рекомендую использовать только оригинальные запасные части, чтобы избежать проблем с навигацией.
После удаления неисправного двигателя можно приступать к установке новой запасной части для лидара в обратном порядке.
Неполадки, которые требуют разборки
Список неисправностей включает в себя множество ошибок, которые часто отображаются пылесосом:
- Устройство вращается на одном месте или не работает должным образом;
- не включается или ничего не делает;
- не собирает мусор;
- Турбощетка или боковые насадки перестали работать;
- Инфракрасные датчики больше не обнаруживаются.
- скрипит или шумит;
- Колеса не вращаются;
- Не видит базу или не заряжается;
- система сообщает об ошибке;
Некоторые из этих проблем вызваны засорением пылесоса. Разберите пылесос, аккуратно сняв контейнер для пыли, большую и боковые щетки, а также фильтры. Затем тщательно все вымойте, при необходимости ополосните. Не забудьте протереть все детали и самого робота влажной тканью и дать ему высохнуть.

Рекомендуется заменять поврежденные фильтры, чтобы устройство работало правильно.
- https://ExpertLand.ru/tehnika/pylesos/remont-robota
- https://hozzi.ru/klining/kak-pochistit-robot-pylesos-xiaomi
- https://setafi.com/bytovaya-tehnika/pylesos/kak-razobrat-robot-pylesos/
- https://otdelka-remont.ru/remont-robot-pylesos-xiaomi-svoimi-rukami/
- https://robotratings.ru/zamena-lidara-xiaomi/
Как разобрать пылесос — универсальная инструкция

Пылесос – незаменимая техника в быту, без которой не обходится ни одна уборка в современном мире. Он стал прекрасной альтернативой венику, при этом собирает мусор лучше с любых поверхностей и не требует особых усилий при эксплуатации. Однако любой модели требуется особенный уход, поэтому перед владельцем этого вида бытовой техники рано или поздно встает вопрос, как разобрать пылесос, чтобы провести его чистку, заменить мешок, если предусмотрены одноразовые пылесборники, а также провести различные манипуляции для качественной работы.
Большинство современных конструкций пылесосов схожи, что дает возможность разработать единый алгоритм разборки устройств с целью обслуживания или диагностики неполадок.
Когда нужно разбирать пылесос
Вечных двигателей не бывает, это касается и бытовой техники для уборки. Приступать к разбору пылесоса следует при наличии определенных тревожных сигналов:

- Во время использования двигатель устройства неожиданно затихает, а потом продолжает свою работу. Возможно, причина кроется в повреждении сетевого кабеля, однако зачастую это является следствием сбоя в работе мотора пылесоса.
- После включения появляется громкий, нехарактерный гул, при этом устройство может оставаться в рабочем состоянии и даже выполнять свои функции.
- Заклинивание двигателя, которое выражается в заметном свисте, скрежете и грохоте. Часто виной этому становится поломка подшипников. Желательно предварительно изучить инструкцию, как открыть пылесос используемой модели, чтобы иметь представление о расположении деталей.
- Слабая сила всасывания, несмотря на то, что недавно был установлен новый пылесборник.
- Плавающие обороты двигателя говорят о том, что устройство скоро выйдет из строя.
- Появление запаха гари и ощущение пыли в воздухе.
Как разобрать корпус
Любая инструкция иллюстрирующая, как разобрать пылесос, начинается с алгоритма вскрытия корпуса устройства. Оно, в свою очередь, может быть как частичным, так и полным.
Первый вариант необходим при замене пылевых мешков, очистки контейнера и фильтров. При необходимости диагностики состояния двигателя проводят полную разборку, для которой потребуются инструменты. Зачастую они присутствуют в комплекте к выбранной модели пылесоса.
Полную разборку желательно проводить для любой модели хотя бы раз в год. Несмотря на наличие системы фильтров, пыль может оседать на крыльчатке вентилятора и самом моторе. Излишнее скопление грязи может привести к постепенному выходу устройства из строя.
Как разобрать пылесос для визуального осмотра, подскажет следующий алгоритм:

- Устройство выключают из сети, демонтируют все внешние части – снимают шланги, открывают крышку, вынимают пылесборник и фильтры. Если насадки пылесоса, идущие в комплекте, располагаются в специальном отсеке корпуса, их следует также удалить.
- Перед разбором корпуса, прежде чем следовать алгоритму, как открыть пылесос, важно изучить его строение на предмет наличия крепежей. В противном случае велик риск сломать пластиковый кожух устройства.
- Все крепежные детали необходимо расположить в отдельном месте и подписать по необходимости, чтобы не запутаться в процессе сборки.
После снятия и разбора всех деталей корпуса приступают к изучению внутреннего содержимого мотора.
Демонтаж мотора
Если проведенный осмотр и чистка не привели к устранению симптомов неисправности, придется изучить инструкцию, как разобрать пылесос, что называется, до последнего винтика. Двигатель большинства моделей, как правило, располагается в специальном отсеке на дне корпуса. Его нужно отсоединить от платы, сняв крепежные элементы.

Двигатель может быть заключен в дополнительный пластиковый корпус, который также потребуется снять. Далее откручивают клеммы винта и достают щетки. Крыльчатка вентилятора двигателя обычно располагается под специальным металлическим колпаком, который слегка сбивают молотком.
Далее демонтируют крыльчатку, заклинив якорь деревянным бруском, чтобы не допустить его проворачивание. Гайку вентилятора необходимо демонтировать с помощью торцевого ключа, после чего деталь можно легко снять рукой с ротора.
На самом корпусе мотора раскручивают стяжные винты, в результате он должен разъединиться на две половины. Важно аккуратно расположить все детали в верном порядке, чтобы не запутаться при обратной сборке.
Проводят очистку всех компонентов мотора от скопившейся пыли, замену вышедших из строя деталей и приступают к сборке в обратной последовательности.
После того как все детали пылесоса собраны, необходимо сделать пробный запуск на непродолжительное время. Если никаких сбоев в работе не обнаружено, можно приступать к уборке.

Данные инструкции, как разобрать пылесос, являются универсальными и подходят для большинства моделей. Но важно учитывать, что такие алгоритмы подходят для несложных бюджетных моделей. Современные дорогостоящие роботы-пылесосы требуют вмешательства специалистов.
Как разобрать и почистить Roomba 560
- Избранное: 18
- Завершено: 27
Источник: st-int.ru
Робот-пылесос Xrobot XR510c — отзыв

Робот-пылесос XRobot XR510-C — отзыв после двух лет использования + пошаговая инструкция как его разобрать (с фото)
Опыт использования:
год или более
Робот пылесосит хорошо — каждый день собирает приличную кучу пыли. В начале использования время уборки составляло около полутора часов. Затем постепенно аккумулятор садился, и через два года робот стал убирать всего по 15-20 минут. Проблема решается заменой аккумулятора.
Перемещается робот при уборке хаотично, может начать убирать одну комнату, потом поехать в другую, может ходить по одному месту несколько раз. Робот ездит быстро и достаточно мощный, двигает разные предметы по комнате (например, компьютерное кресло, полутораметровую елку, стулья). В проемы, которые лишь немного шире его самого, он не заедет, а если его туда посадить — не сможет выбраться.
В комплекте идет база для зарядки, пульт управления, виртуальная стена, сменная боковая щетка, отвертка, инструкция на английском языке (без проблем скачала инструкцию на русском с интернета). Для пульта нужны мизинчиковые батарейки, для стены — пальчиковые. Перед началом работы пульт управления, базу и стену надо синхронизировать с роботом (делается по инструкции, иначе возможна некорректная работа).



Робот пылесос вызывает привыкание. Один раз попробовав его, вы уже не сможете отказаться от той чистоты, которую он обеспечивает.
После двух лет работы перестало крутиться одно колесо. Разобрав робота, обнаружила, что стерлись зубья на пластиковом зубчатом колесе. Вероятнее всего, это произошло из-за больших нагрузок, когда робот упирался в шкаф и не срабатывал датчик, что он уперся (пункт 1 недостатков). Для робота можно найти в продаже все комплектующие (аккумулятор, блоки колес, пылесборник и т.д.), правда, стоят они недешево.
- Собирает много пыли. Разница чувствуется сразу – на ламинате уже через пару дней после уборки появляются пыльные «перекати-поле». С роботом такой проблемы нет. Заметно меньше пыли скапливается на мебели.
- Есть возможность запрограммировать начало уборки на определенное время каждый день или выбрать количество дней в неделю, пришел с работы – а у тебя убрано.
- Есть возможность ограничить место уборки с помощью виртуальной стены, которая идет в комплекте.
- Есть два режима скорости перемещения. Я всегда использовала на большой скорости.
- Робот-пылесос дисциплинирует вас – приучает не разбрасывать тапки, носки, убирать провода и другие предметы, которые могут помешать ему работать.
- Туповат: не всегда возвращается на базу, может ездить вокруг нее и не видеть; если препятствие находится выше датчика, может упереться в него и продолжать пытаться ехать, пока не разрядится.
- Не ездит по коврам, может забраться на ковер, но на нем остановится.
- Довольно шумный, читать или смотреть телевизор, когда он убирает некомфортно, поэтому лучше, чтобы он работал, когда никого нет.
- Не очень удобно его чистить, нужно много частей снять и открутить.
Пошаговая инструкция как разобрать робота:
-
Снять пылесборник и щетки

























![]()
Как видно, одна шестерня пластиковая, а остальные — металлические. У меня на одном колесе «съелись» зубья пластиковой шестерни, поэтому оно перестало крутиться.
Подводя итоги, могу сказать, что робот очень хороший помощник, однако, если позволяют средства, лучше приобрести более дорогой вариант, в котором будет меньше недостатков, к примеру, как мой второй робот-пылесос Panda X600 Pet Series.
Источник: irecommend.ru
Разбираем робот-пылесос iRobot Roomba Sage 4110 (много фоток)

После просмотра промо-роликов меня не покидал вопрос — является ли робот пылесосом или просто щёткой?
Разберём и посмотрим
Подробности процедуры разбора робота-пылесоса можно посмотреть на видео, а я отмечу некоторые нюансы.

Вот он наш пациент

Это пимпа на носу робота — световод, для приёма сигналов от виртуальных стен и зарядной станции.

по правому борту бампера датчик стены (чтобы робот мог двигаться и совершать уборку вдоль стены)

поставим пациента на бок и под действием пружин колёса сразу выходят
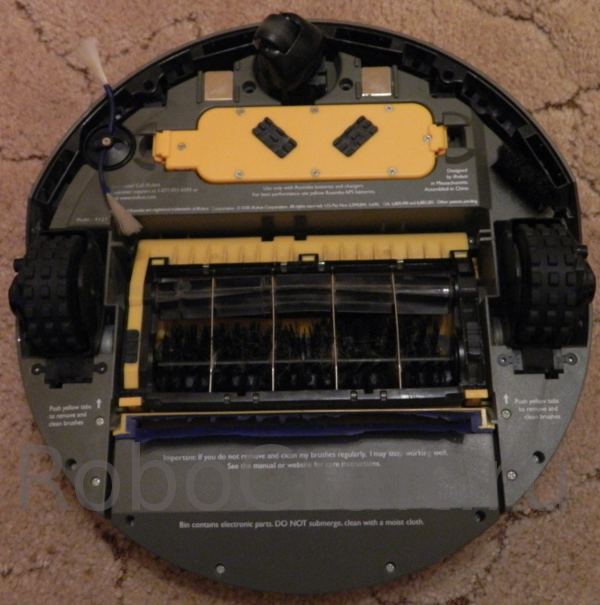
переворачиваем робота на спину
— видно четыре щели под бампером — это датчики пола (чтобы робот не падал с лестниц)
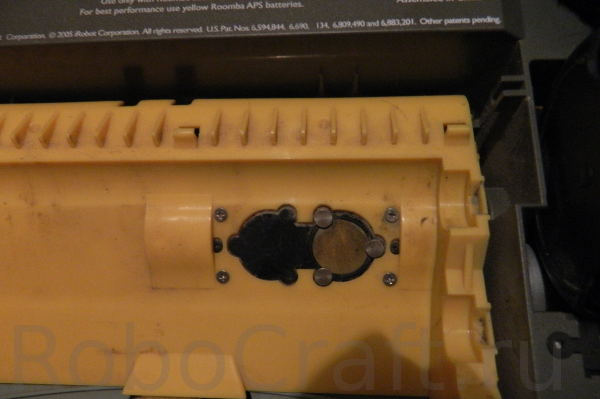
жёлтая штуковина за передним колесом — это аккумулятор (14.4V (Ni-MH))

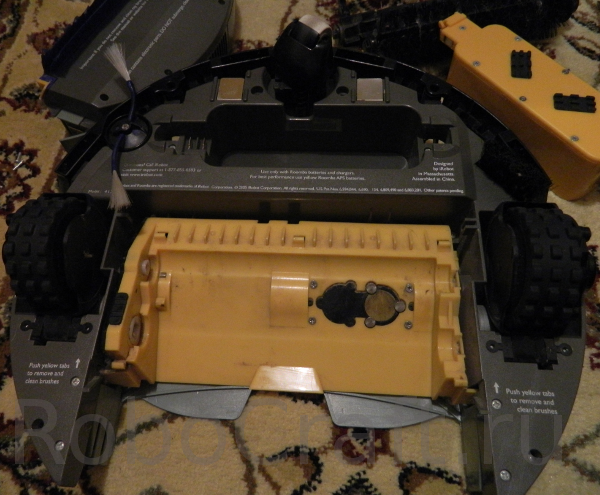
переднее подруливающее колесо и аккумулятор крупным планом.
Видны контакты для подзарядки от базовой станции
Аккумулятор, я покупал отдельно и, возможно, он отличается от стандартных, т.к. я находил упоминания о том, что стандартный аккумулятор закручиваются болтами с шлицом под отвёртку треугольной формы.

одна из прорезей для датчиков пола
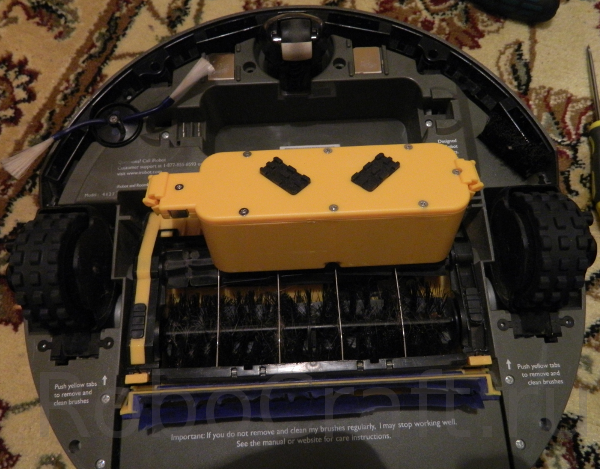
робот, со снятым аккумулятором

робот, со снятым бампером
— видна возвращающая пружина бампера.
Отмечу, что датчики касания у бампера — не обычные кнопки, а те же фото-элементы.

бампер подключается к роботу через один разъём
отстёгиваем контейнер
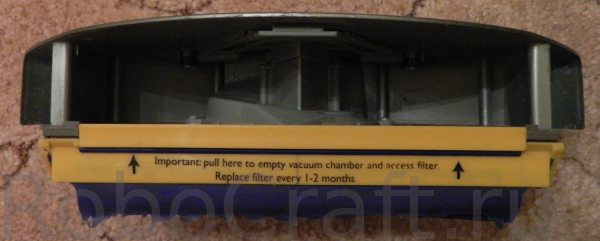
Контейнер для сбора мусора

вытаскиваем фильтр
видно отверстие для всасывания воздуха

открутим нижнюю крышку контейнера

а теперь верхнюю
— видим моторчик, который и является «пылесосом»
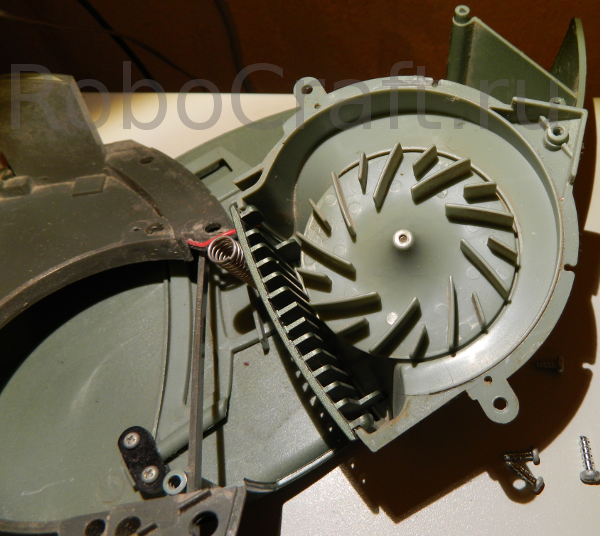
вот она — крыльчатка пылесоса
Возвращаемся к роботу
Датчик «сильного загрезнения»
снимаем верхнюю крышку робота. Она опять же подключается к роботу через один разъём (шлейф от кнопок управления и светодиодной индикации)
— обратите внимание сколько мусора скапливается во внутренностях робота

левая сторона, виден динамик и колесо, подтянутое пружиной
— так же видна одна из множества стяжек, обильно используемых для фиксации проводки робота

надавим на колесо, приведя его в рабочее положение
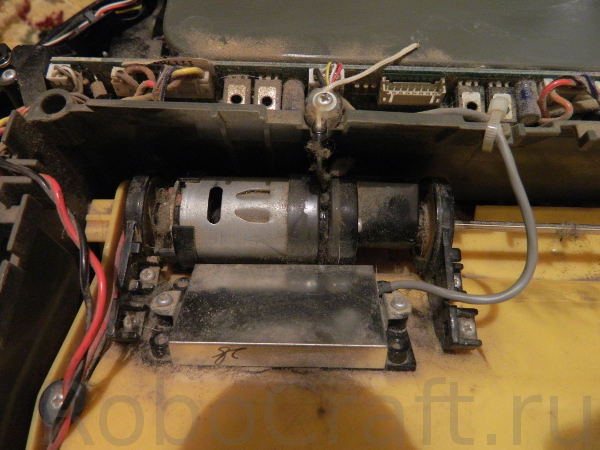
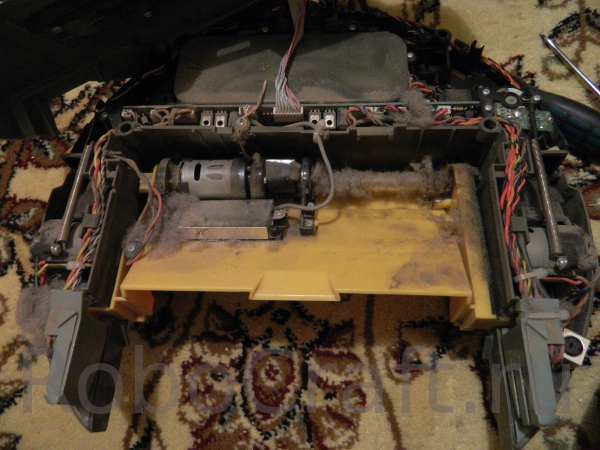
центральная часть, освобождённая от скопившегося мусора.
Это моторчик с редуктором, вращающий шётку
— блестящая коробка — это сенсор сильного загрязнения
в верхней части видна «материнская плата» робота, на которой выглядывают мощные транзисторы (скорее всего — драйвера двигателей).
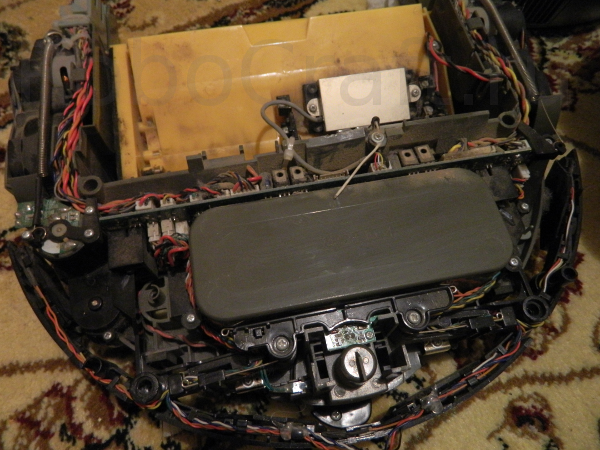
Как видим, большая часть робота — это аккумуляторный отсек и «жёлтая часть» щётки
— слева — моторчик, приводящий в движение «подгребающую» щётку.
как я уже упоминал, мотор-редуктор щётки подвешен на верёвочке — тем самым достигается его авторегуляция
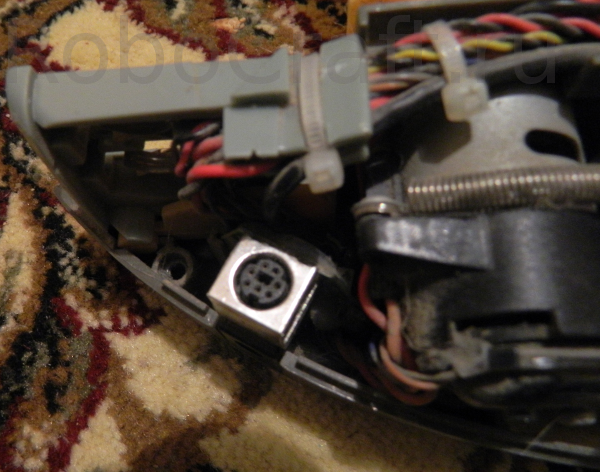
Правая сторона, колесо и консольный разъём mini-DIN-7, через который можно управлять роботом.
— именно через этот разъём можно управлять роботом, добавив ему более мощный интеллект на Arduino или ПК.
Источник: robocraft.ru