Xiaomi Mijia Sweeping Vacuum Cleaner 1C — калибровка датчиков
Не так давно я изложил свои мысли об опыте использования робота пылесоса Xiaomi Mijia Sweeping Vacuum Cleaner 1C. В статье рассказал, что пылесос стал странно себя вести и что решить проблему помогло только отключение и включение режима «Экспериментальные функции» в оригинальной программе MiHome, в модифицированном приложении MiHome от vevs эффект от отключения/включения данного режима не дал результат. К сожалению данное решение имело лишь временный эффект, после, примерно, 10 дней использования проблемы вернулись.
Описание проблемы
Пылесос начинает плохо ориентироваться в пространстве. Это выражается так:
- При уборке змейкой пылесос убирает помещение с небольшой (или большой) диагональю.
- Может поехать из одной части помещения в другую и обратно.
- По нескольку раз хаотично возвращается к уже убранным местам.
- Не может найти базу при возвращении.
- Вместо разворота на месте сдает задом и разворачивается.
- При возвращении на базу очень резко стартует, без бака с водой, с отрывом от пола переднего колеса.
Сброс настроек по умолчанию не помогает.
Нужно ли отключать базу робота-пылесоса из розетки?
Решение
На «синем» сайте и в telegram канале kapiba.ru была найдена инструкция технического сервиса по калибровке датчиков пылесоса.
Калибровка датчиков
Для калибровки датчиков потребуется установить модифицированную версию MiHome от vevs (архив версий, зеркало MiHome 6.1.701 от vevs).
Что бы получить доступ к сервисным функциям необходимо в файле плагина /Android/data/com.xiaomi.smarthome/files/plugin/install/rn/1000004/XXXXXXX/android/main.bundle исправить строчку:
Запускаем MiHome от vevs, переходим в плагин пылесоса -> меню настроек (три точки) -> История уборок -> нажать 10 раз на заголовок со статистикой уборок.

Переходим в меню калибровки сенсоров:

Как настроить робот-пылесос Xiaomi Mi Robot Vacuum Cleaner
Модели китайского производителя самостоятельны и работают сразу из коробки, требуя от пользователя нажать на кнопку уборки. Но при таком использовании функционал девайса минимален, а первая же зарядка потребует действий владельца.
Сначала мы расскажем о базовом варианте, а потом как настроить робот-пылесос xiaomi через приложение для использования по максимуму.
Настройка Xiaomi Mi Robot без приложения
От вас требуется дать возможность девайсу заряжаться, проверить состояние аккумулятора и подготовить квартиру.

Нужно ли отключать робот-пылесос после зарядки?
- Достаём базу из коробки и подключаем к электрической сети. Китайцы позаботились об эстетике, поэтому сделали в базе нишу для провода, чтобы он не валялся на полу.
- Базу располагаем таким образом, чтобы присутствовало свободное место вокруг нее: полметра по сторонам, метр спереди. Лично у меня база стоит под небольшим столиком и пылесос спокойно залазит под него, игнорируя официальные требования. Экспериментируйте.
- Далее подключаем пылесос к базе. В зависимости от версии, контакты находятся в разных местах корпуса. Если всё в порядке, то вы заметите световую индикацию сверху. Готово!
Лень совмещать контакты вручную? Поставьте девайс в нескольких сантиметрах от включенной базы и нажмите кнопку с домиком на крышке корпуса. Если есть хоть пара процентов заряда, стыковка произойдёт автоматически.
Говоря о том, как настроить робот-пылесос самостоятельно, нельзя забывать о подготовке квартиры. Убедитесь, что по полу не разбросаны провода, в которых устройство запутается или порвет. Уберите ковры с бахромой по краям и следите, чтобы домашние животные ничего не оставляли на полу. Размазанные во время уборки следы их жизнедеятельности – крайне неприятное зрелище.
Ваш новый помощник оснащён датчиками высоты, поэтому никакие лестницы ему не страшны. Главное, чтобы датчики были чистыми. Также вы можете запустить устройство на каком-нибудь столике, если вдруг поленитесь самостоятельно протереть тряпочкой.
Индикация
Стоит упомянуть о голосовых сообщениях и световой индикации, позволяющих знать, в каком настроении ваш робот сегодня.
При переключении режимов или возникновении ошибок Xiaomi доложит вам об этом голосом. РСТ-версия сейчас разговаривает на английском языке, серая – на китайском. Возможна прошивка своего голосового пакета с русскими фразами, но это тема для полноценной статьи.
Светодиодный индикатор работает следующим образом:
- Равномерное свечение без мигания – аккумулятор заряжен на 100%, девайс готов к труду и ждёт нажатия на кнопку уборки.
- Белое свечение – заряд более 50%.
- Жёлтое свечение – менее 50%.
- Красное свечение – заряд менее 20%, пора подкрепиться.
Как настроить Xiaomi Mi Robot через приложение
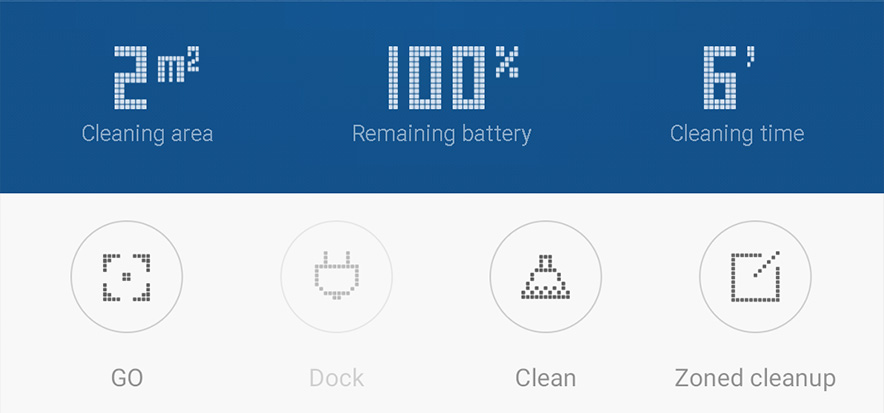
Процесс эксплуатации пылесоса становится приятнее, благодаря специальному приложению Xiaomi. При его использовании можно включить робота дистанционно или запрограммировать на уборку в удобное время.
Кроме этого, вы сможете следить за износом щёток, временем и площадью уборки, изучать карту квартиры, составленную девайсом и обновлять прошивку.
- Загружаем приложение Mi Home в App Store для iPhone или Google Play для Android.
- Выбираем сервер, исходя из региона вашего помощника. Если вы покупали в официальном магазине РСТ-версию, вам подойдёт Россия или Европа. Если вы сэкономили и купили серую версию, то выбирайте Китай.
На этапе выбора сервера у многих начинаются проблемы. Попробуйте перебрать Китай/США/Сингапур/Россия.
- Входим в аккаунт, если являетесь пользователем Xiaomi или регистрируем новый.
- Затем добавляем новое оборудование, нажав на «добавить устройство» и выбираем из появившегося списка наш робот.
Если mi home не видит пылесос и в списке пусто, зайдите в настройки вашего смартфона и выдайте все разрешения приложению Mi Home.
- Далее устанавливаем Xiaomi Mi Robot на подключенную к розетке базу, нажимаем на верхнюю кнопку на крышке корпуса и удерживаем ее в течение 6 секунд. После этого прозвучит звуковой сигнал, сообщающий об установлении связи с программой.
- В программе выбираем модель устройства и свой канал Wi-Fi для управления им.
- В завершении настройки выбираем основное местоположение робота-пылесоса, например «Гостиная», после чего начинается процесс непосредственного управления Xiaomi Mi Robot.
Теперь вы можете управлять всем. Выбирать варианты озвучки и её громкость, следить за процессом уборки и отдавать команды, указывая пальцем на зону в комнате.
Популярные бренды
Новые статьи
- Выбираем робот-пылесос для уборки шерсти: наш топ лучших моделей
- Топ 6 недорогих, но хороших роботов-пылесосов в бюджетном сегменте
- Робот-пылесос для чистки ковров
- Лучшие роботы — пылесосы с построением карты помещения
- Что нужно знать при покупке робота-пылесоса среднего бюджета (от 15000 руб.)
- Какой робот-пылесос лучше выбрать
- Самые частые неисправности робота-пылесоса и способы устранения
- Как настроить робот-пылесос Xiaomi Mi Robot Vacuum Cleaner
Источник: robotvacuums.ru
Калибровка датчиков Xiaomi 1C Sweeping Vacuum Cleaner
Все роботы-плесосы экосистемы Xiaomi MiHome при уборке ориентируются и передвигаются в пространстве по схожим алгоритмам. В идеале робот во время уборки должен передвигаться змейкой и не возвращаться на уже убранную территорию. Возвращение на базу должно быть уверенным и безошибочным. Но, к сожалению, в определенный момент, могут происходить сбои в программном обеспечении, которые нарушают правильную ориентацию пылесоса в пространстве.
О какой модели робота-пылесоса идет речь ?
На рынке представлено две модели:
- SKV4073CN — для рынка Китая, называется Xiaomi MiJia 1C Sweeping Vacuum Cleaner
- SKV4093GL — для Европейского рынка под названием Xiaomi MiJia Vacuum Mop
Обе модели — это один и тот же пылесос. Отличие у них только в вилке питания зарядной базы, переведенной инструкции и языковых пакетах.
Признаки для калибровки
Робот начинает плохо ориентироваться при уборке. Можно наблюдать некоторые моменты в поведении, либо все сразу:
- В процессе уборки (змейкой) начинает передвигаться с большей, либо меньшей диагональю.
- Начать уборку может поехав сразу в следующую комнату, а не с той, где находиться база.
- Возвращается в уже убранные места.
- Не может найти базу при возвращении или же долго ее ищет.
- По окончании уборки может резко стартануть на базу и если в это время будет отстегнут водяной контейнер, то начинает ехать на двух колесах с отрывом переднего от пола.
Если у вас наблюдаются данные странности с этим пылесосом, то нужно сделать калибровку датчиков.
Что для этого нужно?
- Смартфон на Android
- Установленный мод MiHome от Vevs’а
По пунктам
1 Необходимо активировать сервисное меню в плагине пылесоса.
Для этого нужно открыть файл плагина пылесоса «main.bundle» любым текстовым редактором, найти и изменить строчку
if (Array.isArray(data.data) data.data.indexOf(_miot.Service.account.ID) >= 0) < _this.setState(< isRepairUser: true >); >
if (Array.isArray(data.data)) < _this.setState(< isRepairUser: true >); >
- Если на телефоне Android 9 и ниже, то файл искать по пути /Android/data/com.xiaomi.smarthome/files/plugin/install/rn/1000004/XXXXXXX/android/main.bundle
- Если же установлен Android 10 и выше нужно:
- В настройках телефона предоставить приложению Mi Home разрешение на доступ к внешнему хранилищу;
- В корне памяти смартфона создать папку /ВНУТРЕННЯЯ_ПАМЯТЬ/vevs/files/ ;
- Выгрузить из памяти или полностью остановить Mi Home;
- Снова запустить MiHome и зайти в плагин пылесоса → После этого плагин должен перекачаться по нашему новому пути.
- Исправляем файл плагина main.bundle по следующему пути /ВНУТРЕННЯЯ_ПАМЯТЬ/vevs/files/ plugin/install/rn/1000004/XXXXXXX/android/main.bundle
2 Запускаем Михом, переходим в плагин пылесоса → меню настроек (три точки правом верхнем углу) → История уборок → 10-ть раз нажать на заголовок со статистикой уборок.

3 Переходим в меню «Sensor calibration» (калибровка сенсоров).

- Версия прошивки робота-пылесоса должна быть выше 1025, иначе ее необходимо обновить.
- Смартфон и пылесос должны быть подключены к одной сети Wi-Fi.
4 Устанавливаем пылесос на ровный пол. Для точности, наносим на полу метки (например наклеить на пол строительный скотч или использовать рисунок ламината), чтобы можно было относительно меток поправить пылесос после калибровки.

5 В меню «Sensor calibration» (Калибровка сенсоров) нажимаем «Gyroscope calibration» (Калибровка гироскопа).

В течение 10-ти секунд, после нажатия, робот-пылесос будет стоять не подвижно, затем выполнит 10 оборотов на месте. После выполнения 10-ти оборотов робот должен вернуться в исходное положение. Если есть какая-либо погрешность, то нужно вручную повернуть пылесос на исходную позицию и повторить калибровку.
После того как пылесос вернется в то же самое положение, нажимаем кнопку «Gyroscope move confirmation» (Подтверждение перемещения гироскопа).

ВАЖНО! Для последующих калибровок понадобится пространство на полу размером → длина 4-ре метра, ширина 1 метр. На пути движения не должно быть никаких преград и неровностей.
6 Устанавливаем робота на ровную поверхность → Нажимаем «Optical flow A calibration» (калибровка оптического потока А).

Робот-пылесос подтвердит выполнение команды голосовым сообщением → Проедет вперед 3 метра → Развернётся на 180° и должен вернуться в точку отправления. Если есть какие-то отклонения от исходной позиции, то нужно вручную выставить пылесос и повторить калибровку.

7 По аналогии с предыдущим пунктом выполняем «Optical flow B calibration» (калибровка оптического потока B).
ПРИМЕЧАНИЕ В карточке устройства данного пылесоса, в разделе файлы, прикреплены оригинальные инструкции от сервисного центра.
Источник: rumihome.ru