Если вы уже купили себе Xiaomi Mi Robot Vacuum с сухой уборкой или только собираетесь его взять, то эта статья вам может однажды пригодиться В ней мы отвечаем на самые популярные вопросы по устранению возможных неисправностей в этом роботе-пылесосе.
В пылесосе используется литиевая батарея, у которой нет «эффекта памяти», именно поэтому нет необходимости заряжать/разряжать робот-пылесос полностью.
2. Как сбросить настройки Wi-Fi? Если робот перестал подключаться к телефону, то стоит попробовать сбросить настройки Wi-Fi. Для этого:
- Откройте крышку
- Нажмите одновременно на кнопку «Питание» и «Home» до голосового оповещения
Если индикатор Wi-Fi начнёт мигать, то это означает лишь одно — вы настоящий герой, который справился с задачей.  3. Можно ли самостоятельно обновить прошивку? Да, конечно, это очень легко! Всего лишь нужно зайти в мобильное приложение. Но помните!
3. Можно ли самостоятельно обновить прошивку? Да, конечно, это очень легко! Всего лишь нужно зайти в мобильное приложение. Но помните!
Как проверить робот- пылесос Xiaomi mi robot vacuum на наличие обновлений через Mi Home ?
При обновлении робот должен быть подключен к док-станции, а его зарядка должна быть больше 20%. Если индикатор возле кнопок (см. фото ниже) замигает белым цветом, то вы вновь одержали победу, обновив ПО пылесоса! Можно идти отмечать 
Если Mi Robot Vacuum решил не реагировать на вас: не нажимаются клавиши, не включается сам пылесос и т.д., то стоит просто понять вашего «друга», он устал и ему нужна перезагрузка. Для этого просто нажмите на кнопку сброса (маленькая кнопка Reset под крышкой), и робот снова оживёт и начнёт вновь радовать вас чистотой в доме. Внимание!
Перезагрузка системы сбросит синхронизацию, режим уборки и настройки Wi-Fi. 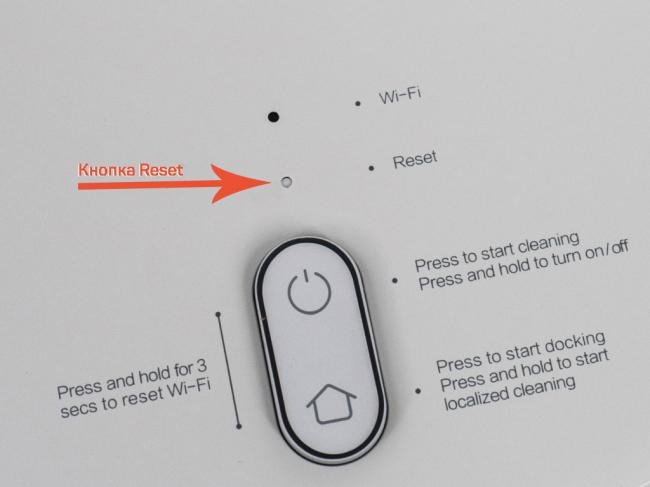 5. Сброс настроек не помог Что можно ещё сделать? Да, такое тоже бывает. Но волноваться незачем.
5. Сброс настроек не помог Что можно ещё сделать? Да, такое тоже бывает. Но волноваться незачем.
Если сброс настроек не помог, нажмите на кнопки «Reset» и «Home» одновременно и дождитесь голосового оповещения, которое означает, что пылесос восстанавливается до заводских настроек. 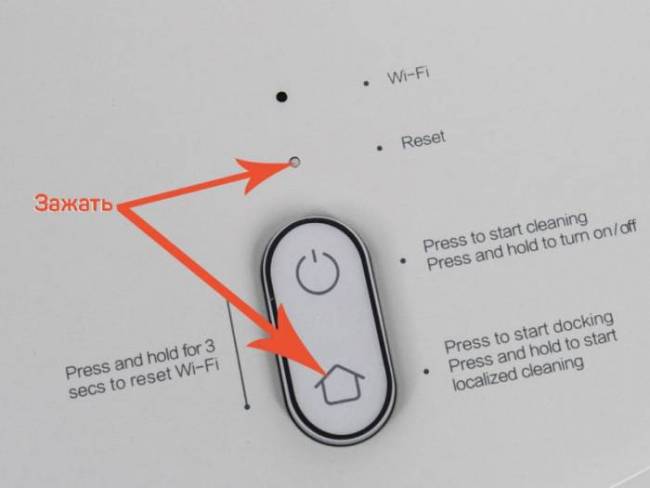
6. Почему робот не хочет включаться?
Возможно, робот просто сел и для решения проблемы нужно только подключить его к док-станции, благодаря которой он зарядится. Ну а ещё есть вариант, что вы используете его в неправильном температурном режиме. Рабочий диапазон у робота: от 0° до 40°.
7. Почему у меня не получается зарядить робот-пылесос?

Тут тоже есть два варианта сценария. Во-первых, как бы это банально не звучало, проверьте, подключена ли док-станция к сети. Ну а во-вторых, посмотрите, не загрязнены ли коннекторы на док-станции и зарядные разъёмы у самого робота.
8. Как быть, если робот стал плохо прибираться, или если после него остаётся грязь?
В этом случае рекомендуем очистить мусорный контейнер, фильтры и центральную щётку, на которой могут спутаться волосы и шерсть.
9. Как много энергии потребляет пылесос, стоя на зарядке?
На док-станции пылесос потребляет энергию только до получения полной зарядки, затем же он уходит в режим покоя для сохранения максимальной производительности.
10. Не работает уборка по расписанию. Что делать?
Узнавайте больше вместе со Smart Fox!
Работа способность робота-пылесоса иногда нарушается. Владельцам автоматизированных устройств не стоит переживать по этому поводу, так как при возникновении ошибки, код высвечивается на дисплее или при помощи звукового сигнала. Большую часть ошибок, пользователь может устранить самостоятельно, использую инструкцию по эксплуатации, в которой описаны обозначения кодов.
В статье я предоставлю таблицы с расшифровками ошибок для разных производителей.
Коды ошибок роботов пылесосов
iRobot
Голосовые сообщения об ошибках в процессе зарядки аккумулятора.
| Кол-во миганий индикатора | Надпись на дисплее (панели управления) | Возможная проблема | Решение |
| 1 | Err1 | У робота нет контакта с аккумулятором. | Убедитесь, что извлекли защитную ленту. Снимите нижнюю панель и переустанови- те аккумулятор. При загрузке прозвучит мелодия. |
| 2 | Err2 | Аккумулятор не подключен, либо используется нештатное зарядное устройство, либо за- рядное устройство неисправно. | Попробуйте произвести программный сброс одновременным удержанием кнопок DOCK и SPOT в течение 12 секунд, затем заново зарядите Roomba. Если проблема не решается таким образом, обратитесь в сервисный центр. |
| 3 | Err3 | Аккумулятор неисправен. | Попробуйте произвести программный сброс одновременным удержанием затем зановоu зарядите Roomba. Если проблема не решается таким образом, обратитесь в сервисный центр. |
| 5 | Err5 | Ошибка заряда. | Попробуйте произвести программный сброс одновременным удержанием кнопок DOCK и SPOT в течение 12 секунд, дайте аккумулятору остыть и снова зарядите Roomba. |
| 6 | Err6 | Аккумулятор перегрелся. | Дайте аккумулятору остыть 30-40 минут и снова зарядите Roomba. |
| 7 | Err7 | Аккумулятор долго не остывает. | Дайте аккумулятору остыть как минимум 1 час и попробуйте зарядить снова. Если проблема не решается, обратитесь в сервисный центр. |
Голосовые сообщения об ошибках в процессе уборки.
2. Робот находится в помещении очень большой площади (например спортзал)
2. Разбейте помещение на условные сектора, используя ограничители движения или физические барьеры
Ошибки во время уборки.
| Кол-во звукового сигнала | Возможные проблемы | Решение |
| 1 сигнал | Неисправность модуля левого колеса | Переставьте Roomba на ровное место, убедитесь, что всё колёсики стоят на полу и перезапустите робота. |
| 2 сигнала | Основные щётки не вращаются. | Снимите и почистите щётки робота, удалите грязь из под колпачков |
| 5 сигнала | Неисправность правого колеса | Переставьте Roomba на ровное место, убедитесь, что всё колёсики стоят на полу и перезапустите робота. |
| 6 сигнала | Загрязнены сенсоры перепада высоты, или робот оказался в точке перепада высоты. | Протрите сенсоры сухой тканью и снова включите Roomba на ровном месте. |
| 9 сигнала | Механическое заедание бампера справа или слева | Постучите по бамперу рукой. Он должен вернуться в нормальное положение. |
| 10 сигнала | 1. Не вращается переднее колесико робота |
2. Робот находится в помещении очень большой площади (например спортзал)
2. Разбейте помещение на условные сектора, используя Ограничители или физические барьеры
iClebo
Сообщение об ошибках на дисплее
| Код ошибки | Причина | Решение |
| C1 | Колесо поднято. | Переместите робота на ровную поверхность. |
| C2 | Ошибка датчика пола. | Переместите робота на ровную поверхность. |
| C3 | Ошибка контейнера для мусора. | Убедитесь, что контейнер для мусора установлен в пылесос как следует и хорошо зафиксирован. |
| C4 | Перегрузка колеса. | Колесу мешает застрявшая в нем грязь, пыль, волосы. Очистите колесо. |
| C5 | Перегрузка щетки. | Щетке мешает застрявшая в нем грязь, пыль, волосы. Очистите основную и боковые щетки. |
| C6 | Перегрузка всасывающего механизма. | Очистите контейнер для мусора, замените фильтр. |
| C7 | Внутренняя ошибка системы. | Выключите робота, передвинув переключатель питания на его нижней стороне в положение OFF, а затем включите, передвинув переключатель в положение ON. |
| C8 | Переднее колесо застряло. | Извлеките переднее колесо и очистите его от пыли и грязи. |
Panda
| Наименование | Причина | Решение |
| Е01 | Левое колесо не работает | Очистить от грязи и волос |
| Е02 | Правое колесо не работает | Очистить от грязи и волос |
| Е03 | Заполнен пылесборник | Очистка контейнера для мусора |
| Е04 | Устройство поднято | Поставить робота на пол |
| Е05 | Ошибка нижних сенсоров | Почистить сенсоры на днище робота или протереть влажной тряпочкой |
| Е06 | Ошибка сенсоров на бампере | Протереть влажной салфеткой бампер |
| Е07 | Левая боковая щетка не работает | Снять боковую щетку, очистить от шерсти и волос. |
| Е08 | Правая боковая щетка не работает | Снять боковую щетку, очистить от шерсти и волос. |
| Е09 | Робот застрял | Установить на ровную поверхность и запустить. |
Справка! Если вышеперечисленные решения не сработали, то следует перезагрузить устройство или обратиться в сервисный центр.
Kitfort
| Наименование | Причина | Решение |
| Е01 | Левое колесо не работает | Очистить колеса от грязи и волос |
Samsung
| Наименование | Причина | Решение |
| C00 | Пылесос застрял | Отключите пылесос кнопкой, которая находится на нижней стороне. |
Перенесите пылесос в другое место.
Вытащите контейнер для пыли из пылесоса.
Удалите посторонние предметы из щетки.
Щетка пылесоса Включите пылесос.
Удалите посторонний предмет из левого колеса.
Удалите посторонний предмет из правого колеса.
Уберите препятствие, расположенное перед пылесосом, или перенесите его на другое место.
Если ошибка опять появилась — убедитесь, что мелкий мусор не попал между бампером и корпусом.
Протрите окна переднего и заднего датчика препятствий мягкой тканью.
Протрите окно датчика обрыва/края мягкой тканью (датчик находится на нижней стороне корпуса в передней части). Датчиков может быть несколько, это зависит от модели.
Удалите посторонние предметы из боковой щетки. Включите пылесос.
Если ошибка не исчезла, обратитесь в сервисный центр Самсунг.
iLife
| Кол-во звукового сигнала | Возможные проблемы | Решение |
| 1 гудок | Колеса или боковые щетки не работают | Проверить колеса или боковые щетки |
| 2 гудка | Неисправность датчика высоты или бампера | Очистить и проверить датчики |
| 3 гудка | Устройство застряло | Переместить робота на ровный участок поверхности |
| 4 гудка | Не работает турбощетка | Очистить от волос и шерсти |
| 5 гудков | Отсутствует пылесборник | Проверить установлен ли пылесборник или фильтр |
Xiaomi
Устранение неполадок при возникновении ошибок.
Справка! Сброс настроек системы помогает решить некоторые неполадки. Если вы не можете устранить проблему предоставленных рекомендаций в таблице, обратитесь в сервисный центр.

Мне 29 лет, последние 8 лет работаю продавцом техники в крупной розничной сети mvideo. Большой опыт в выборе товара и консультировании покупателей. Два года назад столкнулся с роботами пылесосами и мне очень понравилось это направление. В один день понял, что хочу создать личный сайт, где буду помогать читателям с выбором роботов пылесосов. Это мое хобби.
Все материалы этого сайта написаны лично мной. За консультаницей обращайтесь на мою страницу Вконтакте.

05 февраля 2019, 16:43
Всем привет! Данная статья не моя, но я решил её написать, т.к. мучился с поиском ответа, как сменить регион у пылесоса не прибегая к подменам плагинов в приложении MiHome, т.к. на iOS это не реально.
Данная статья собрана по крупицам из целой ветки форума 4PDA, поэтому все разработки, программы и прочее принадлежат их правообладателю!
Итак, приступим. Мы имеем робот пылесос Xiaomi 1-ого или 2-ого поколения европейской версии и не имеем возможность ставить переделанные программы MiHome, т.к. iOS.
- Скачиваем программу для прошивки ссылка
- Находим файл win-mirobo.ini редактируем его согласно примеру
ip=192.168.1.156 token=573241586742486237505263624e4a6b
- ip — ip адрес вашего пылесоса
- token — любым удобным путем (на сайте есть статьи как его получить, я лично получил его через эмулятор NOX и модифицированное приложение MiHome)
- Запускаем win-mirobo.bat с правами Администратора
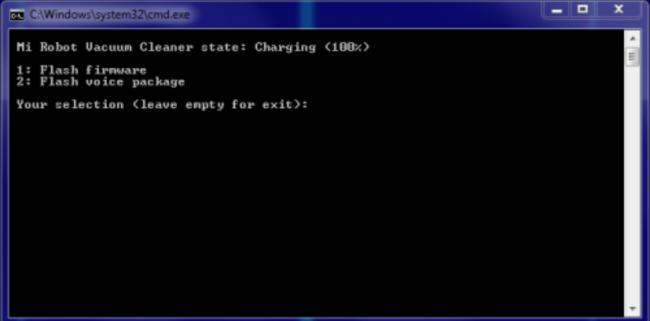
- Нажимаем цифру 1
- Попадаем в меню выбора прошивки тут нужно быть чуточку внимательным и сделать правильный выбор
v11_003132_root.pkg — Для пылесоса первой версии v11_001168_root.pkg — Для пылесоса второй версии
- Далее скачиваем программу Putty и соединяемся по ssh с пылесосом по вашему ip логин: cleaner пароль: cleaner
- Копируем (!) (не в коем случае не пишем сами) данные команды
sudo su mount -o remount,rw /mnt/default ls /mnt/default/roborock.conf cp /mnt/default/roborock.conf /mnt/default/roborock.conf.`date » %Y-%m-%d_%H-%M»` ls /mnt/default/roborock.conf sed -i ‘s/location.*/location=prc/’ /mnt/default/roborock.conf
reboot
Итак, схему я проверил лично и все работает. Если у кого какие вопросы остались, пишите в теме.
- https://smartfox.store/blog/instruktsii/otvety-na-chastye-voprosy-robot-pylesos-mi-robot-vacuum/
- https://bestrobot.info/lifehack/oshibki-robotov-pylesosov/
- https://sprut.ai/client/article/759
Источник: nastoysam.ru
Xiaomi Roborock интеграция в умный дом Home Assistant

Всем привет! Сегодня я хотел бы поговорить о роботах пылесосах в умном доме. Эти устройства прошли эволюцию от обычного робота пылесоса, хаотично тыкающегося в стены и промахивающегося мимо зарядки до пылесоса, умеющего строить карту и двигающемся в упорядоченном порядке. Современные устройства требуют все меньше внимания, переводя управление с физических кнопок в приложения на мобильном телефоне. В этом посте я хочу пойти немного дальше и показать, как подключить робот -пылесос в систему домашней автоматизации Home Assistant и свести взаимодействие с ним только к очистке мусорного контейнера
Сразу хочу отметить, пост не про обзор содержимого коробки и функционала всем известного робота от Xiaomi. Скорее я хочу поделиться тем, как я интегрировал его в умный дом Home Assistant
Из коробки робот неплохо убирается, причем уборка производится не хаотично, а последовательно, робот строит карту помещения с возможностью отметок виртуальных стен (можно посмотреть в приложении MiHome) имеет возможность запуска по расписанию. Так же робот можно интегрировать с другими устройствами экосистемы Xiaomi. По сравнению с моим предыдущим Irobot Roomba 780 это однозначно шаг вперед, я бы сказал прыжок в части удобства уборки, при этом качество уборки как минимум не хуже.
Из оставшихся неудобств — шум при уборке. Особенно это не приятно, когда смотришь телевизор, а он убирается в той же комнате.
Итак, постановка задачи: робот создает много шума, который мешает, поэтому он должен сам проводить уборку, пока никого нет дома. Второе условие- никаких китайских облаков. Все должно работать локально, т.е без интернета.
Для интеграции с Home Assistant в первую очередь нам нужно получить токен робота. Удаляем приложение MiHome на телефоне и устанавливаем ломаную версию MiHome MiHome от vevs на 4pda
Далее
— заходим в плагин пылесоса
— вызываем меню пылесоса (три точки в правом верхнем углу) / General settings / Информация о сети.
— General settings
Если пылесос был добавлен ранее, до установки MI HOME от vevs, нужно его удалить и добавить заново вручную. После получения токена, приложение можно удалить и установить родной MiHome
В файл configuration.yaml Home Assistant помещаем код из файла Xiaomi_vacuum.yaml Перезагружаем сервер и после этого пылесос будут доступен для размещения на домашнем экране. Стандартная карточка позволяет управлять роботам так же как и из родного приложения, просматривать остаток фильтров и пр. Дополнительно скрипт включает в себя пример зональной уборки, когда можно на карточке выбрать комнату в которой нужно убраться, а так же выбор мощности.
Ссылка на плагин GitHub
Карточка может выглядеть к примеру так: 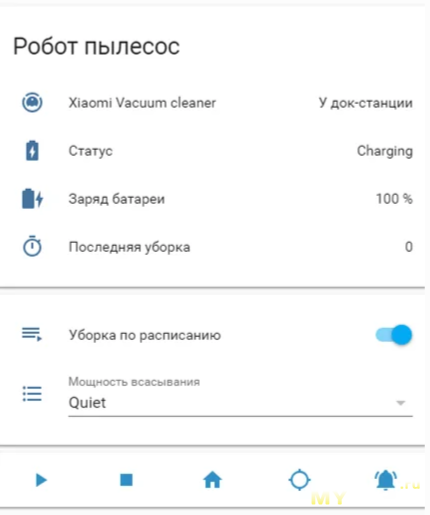
Через какое-то время я пришел к выводу, что ни я ни члены моей семьи ни разу не выбирали отдельную комнату и мощность уборки, поэтому я убрал всю лишнюю информацию и оставил только переключатель автоматической уборки, который я выключаю, когда надолго уезжаю. Теперь карточка выглядит следующим образом: 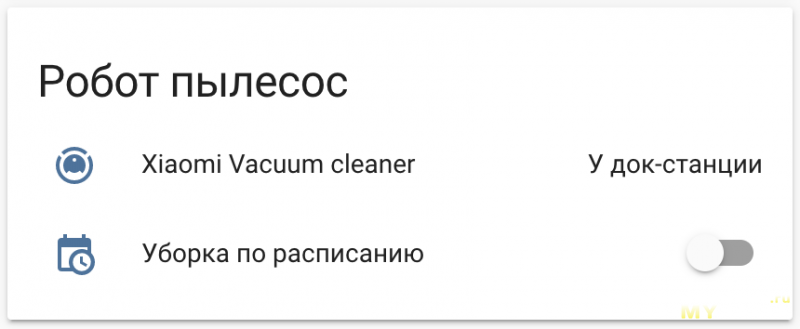
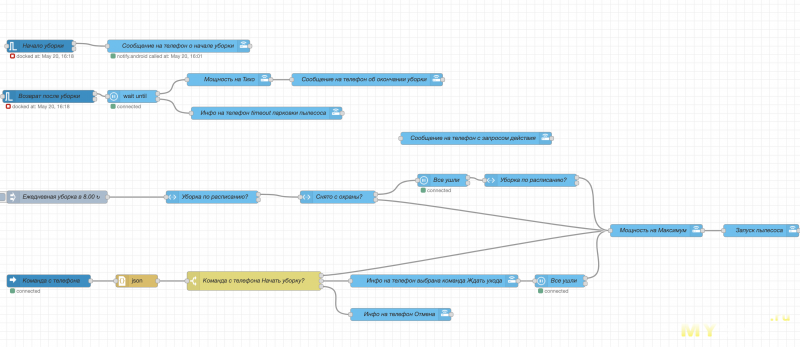
Настраиваем логику работы пылесоса в графическом редакторе Node Red (установленный как addon в Home Assistant). Код автоматизаций приведен в файле node_red_vacuum.txt
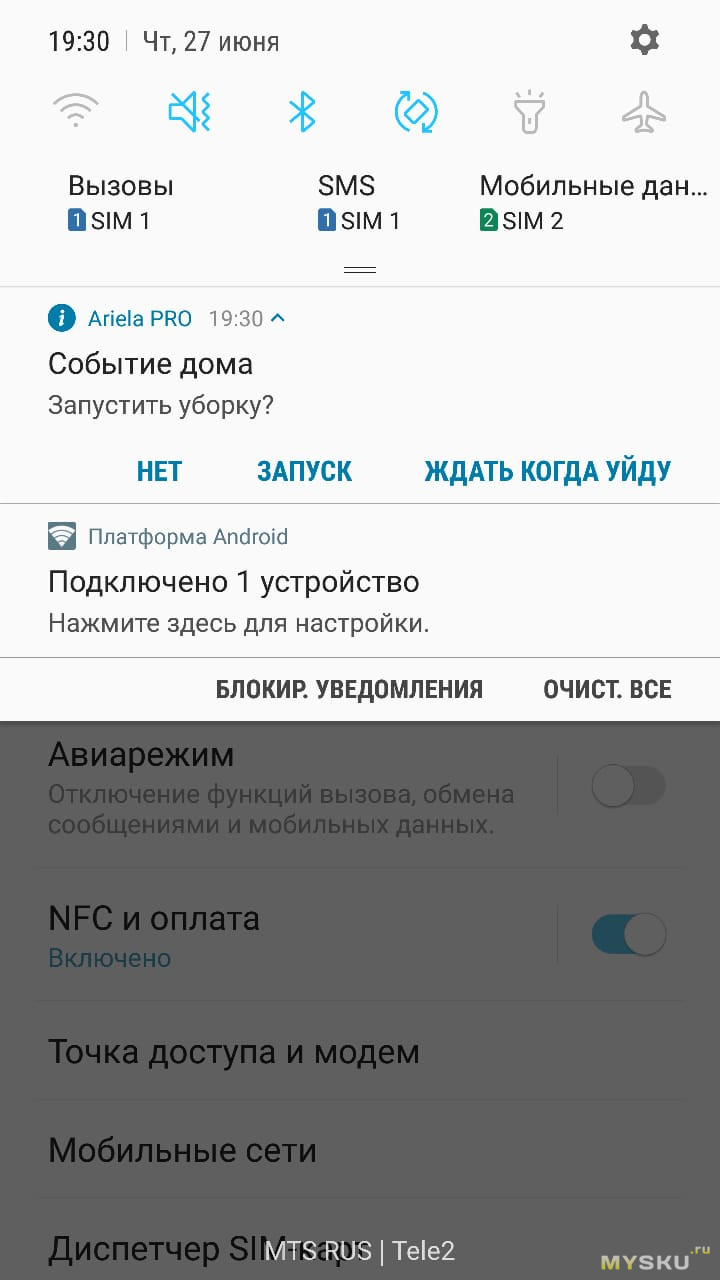
Согласно заложенной логике, пылесос каждый день начиная с 8:00 будет ожидать, когда все уйдут из дома, после чего выставит максимальную мощность всасывания и начинать уборку. Сообщения о начале, окончании и ошибкам во время уборки будут приходить на телефон в виде push сообщений с помощью плагина fcm-android. Так же в 8 утра на телефон придет push запрос: начать уборку сейчас или все-таки подождать. Сейчас я его отключил за ненадобностью, но логика осталась
Ссылка на плагин уведомлений fcm-android:
Ссылка на плагин GitHub
По итогу сейчас мы узнаем об уборке только по информационным сообщениям на телефонах. Но мусор все же выкидывать приходится.
Ну и в завершении модная интеграция с голосовыми помощниками на примере Yandex Алисы
Добавить в избранное Понравилось +39 +79
- 20 мая 2020, 18:19
- автор: cpsskipper
- просмотры: 38229
Источник: mysku.club