Все роботы-плесосы экосистемы Xiaomi MiHome при уборке ориентируются и передвигаются в пространстве по схожим алгоритмам. В идеале робот во время уборки должен передвигаться змейкой и не возвращаться на уже убранную территорию. Возвращение на базу должно быть уверенным и безошибочным. Но, к сожалению, в определенный момент, могут происходить сбои в программном обеспечении, которые нарушают правильную ориентацию пылесоса в пространстве.
О какой модели робота-пылесоса идет речь ?
На рынке представлено две модели:
- SKV4073CN — для рынка Китая, называется Xiaomi MiJia 1C Sweeping Vacuum Cleaner
- SKV4093GL — для Европейского рынка под названием Xiaomi MiJia Vacuum Mop
Обе модели — это один и тот же пылесос. Отличие у них только в вилке питания зарядной базы, переведенной инструкции и языковых пакетах.
Признаки для калибровки
Робот начинает плохо ориентироваться при уборке. Можно наблюдать некоторые моменты в поведении, либо все сразу:
- В процессе уборки (змейкой) начинает передвигаться с большей, либо меньшей диагональю.
- Начать уборку может поехав сразу в следующую комнату, а не с той, где находиться база.
- Возвращается в уже убранные места.
- Не может найти базу при возвращении или же долго ее ищет.
- По окончании уборки может резко стартануть на базу и если в это время будет отстегнут водяной контейнер, то начинает ехать на двух колесах с отрывом переднего от пола.
Если у вас наблюдаются данные странности с этим пылесосом, то нужно сделать калибровку датчиков.
Что для этого нужно?
- Смартфон на Android
- Установленный мод MiHome от Vevs’а
По пунктам
1 Необходимо активировать сервисное меню в плагине пылесоса.
Для этого нужно открыть файл плагина пылесоса «main.bundle» любым текстовым редактором, найти и изменить строчку
if (Array.isArray(data.data) data.data.indexOf(_miot.Service.account.ID) >= 0) < _this.setState(< isRepairUser: true >); >
if (Array.isArray(data.data)) < _this.setState(< isRepairUser: true >); >
- Если на телефоне Android 9 и ниже, то файл искать по пути /Android/data/com.xiaomi.smarthome/files/plugin/install/rn/1000004/XXXXXXX/android/main.bundle
- Если же установлен Android 10 и выше нужно:
- В настройках телефона предоставить приложению Mi Home разрешение на доступ к внешнему хранилищу;
- В корне памяти смартфона создать папку /ВНУТРЕННЯЯ_ПАМЯТЬ/vevs/files/ ;
- Выгрузить из памяти или полностью остановить Mi Home;
- Снова запустить MiHome и зайти в плагин пылесоса → После этого плагин должен перекачаться по нашему новому пути.
- Исправляем файл плагина main.bundle по следующему пути /ВНУТРЕННЯЯ_ПАМЯТЬ/vevs/files/ plugin/install/rn/1000004/XXXXXXX/android/main.bundle
2 Запускаем Михом, переходим в плагин пылесоса → меню настроек (три точки правом верхнем углу) → История уборок → 10-ть раз нажать на заголовок со статистикой уборок.

3 Переходим в меню «Sensor calibration» (калибровка сенсоров).

- Версия прошивки робота-пылесоса должна быть выше 1025, иначе ее необходимо обновить.
- Смартфон и пылесос должны быть подключены к одной сети Wi-Fi.
4 Устанавливаем пылесос на ровный пол. Для точности, наносим на полу метки (например наклеить на пол строительный скотч или использовать рисунок ламината), чтобы можно было относительно меток поправить пылесос после калибровки.

5 В меню «Sensor calibration» (Калибровка сенсоров) нажимаем «Gyroscope calibration» (Калибровка гироскопа).

В течение 10-ти секунд, после нажатия, робот-пылесос будет стоять не подвижно, затем выполнит 10 оборотов на месте. После выполнения 10-ти оборотов робот должен вернуться в исходное положение. Если есть какая-либо погрешность, то нужно вручную повернуть пылесос на исходную позицию и повторить калибровку.
После того как пылесос вернется в то же самое положение, нажимаем кнопку «Gyroscope move confirmation» (Подтверждение перемещения гироскопа).

ВАЖНО! Для последующих калибровок понадобится пространство на полу размером → длина 4-ре метра, ширина 1 метр. На пути движения не должно быть никаких преград и неровностей.
6 Устанавливаем робота на ровную поверхность → Нажимаем «Optical flow A calibration» (калибровка оптического потока А).

Робот-пылесос подтвердит выполнение команды голосовым сообщением → Проедет вперед 3 метра → Развернётся на 180° и должен вернуться в точку отправления. Если есть какие-то отклонения от исходной позиции, то нужно вручную выставить пылесос и повторить калибровку.

7 По аналогии с предыдущим пунктом выполняем «Optical flow B calibration» (калибровка оптического потока B).
ПРИМЕЧАНИЕ В карточке устройства данного пылесоса, в разделе файлы, прикреплены оригинальные инструкции от сервисного центра.
Источник: rumihome.ru
Xiaomi Mijia Sweeping Vacuum Cleaner 1C — калибровка датчиков
Не так давно я изложил свои мысли об опыте использования робота пылесоса Xiaomi Mijia Sweeping Vacuum Cleaner 1C. В статье рассказал, что пылесос стал странно себя вести и что решить проблему помогло только отключение и включение режима «Экспериментальные функции» в оригинальной программе MiHome, в модифицированном приложении MiHome от vevs эффект от отключения/включения данного режима не дал результат. К сожалению данное решение имело лишь временный эффект, после, примерно, 10 дней использования проблемы вернулись.
Описание проблемы
Пылесос начинает плохо ориентироваться в пространстве. Это выражается так:
- При уборке змейкой пылесос убирает помещение с небольшой (или большой) диагональю.
- Может поехать из одной части помещения в другую и обратно.
- По нескольку раз хаотично возвращается к уже убранным местам.
- Не может найти базу при возвращении.
- Вместо разворота на месте сдает задом и разворачивается.
- При возвращении на базу очень резко стартует, без бака с водой, с отрывом от пола переднего колеса.
Сброс настроек по умолчанию не помогает.
Решение
На «синем» сайте и в telegram канале kapiba.ru была найдена инструкция технического сервиса по калибровке датчиков пылесоса.
Калибровка датчиков
Для калибровки датчиков потребуется установить модифицированную версию MiHome от vevs (архив версий, зеркало MiHome 6.1.701 от vevs).
Что бы получить доступ к сервисным функциям необходимо в файле плагина /Android/data/com.xiaomi.smarthome/files/plugin/install/rn/1000004/XXXXXXX/android/main.bundle исправить строчку:
if (Array.isArray(data.data) data.data.indexOf(_miot.Service.account.ID) >= 0) < _this.setState(< isRepairUser: true >); >
if (Array.isArray(data.data)) < _this.setState(< isRepairUser: true >); >
Запускаем MiHome от vevs, переходим в плагин пылесоса -> меню настроек (три точки) -> История уборок -> нажать 10 раз на заголовок со статистикой уборок.
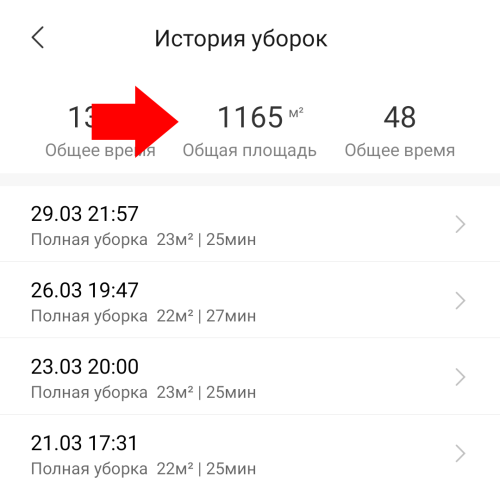
Переходим в меню калибровки сенсоров:
