Все роботы-плесосы экосистемы Xiaomi MiHome при уборке ориентируются и передвигаются в пространстве по схожим алгоритмам. В идеале робот во время уборки должен передвигаться змейкой и не возвращаться на уже убранную территорию. Возвращение на базу должно быть уверенным и безошибочным. Но, к сожалению, в определенный момент, могут происходить сбои в программном обеспечении, которые нарушают правильную ориентацию пылесоса в пространстве.
О какой модели робота-пылесоса идет речь ?
На рынке представлено две модели:
- SKV4073CN — для рынка Китая, называется Xiaomi MiJia 1C Sweeping Vacuum Cleaner
- SKV4093GL — для Европейского рынка под названием Xiaomi MiJia Vacuum Mop
Обе модели — это один и тот же пылесос. Отличие у них только в вилке питания зарядной базы, переведенной инструкции и языковых пакетах.
Признаки для калибровки
Робот начинает плохо ориентироваться при уборке. Можно наблюдать некоторые моменты в поведении, либо все сразу:
Пылесос Xiaomi. Запуск зональной уборки с помощью голосового помощника Алиса.
- В процессе уборки (змейкой) начинает передвигаться с большей, либо меньшей диагональю.
- Начать уборку может поехав сразу в следующую комнату, а не с той, где находиться база.
- Возвращается в уже убранные места.
- Не может найти базу при возвращении или же долго ее ищет.
- По окончании уборки может резко стартануть на базу и если в это время будет отстегнут водяной контейнер, то начинает ехать на двух колесах с отрывом переднего от пола.
Если у вас наблюдаются данные странности с этим пылесосом, то нужно сделать калибровку датчиков.
Что для этого нужно?
- Смартфон на Android
- Установленный мод MiHome от Vevs’а
По пунктам
1 Необходимо активировать сервисное меню в плагине пылесоса.
Для этого нужно открыть файл плагина пылесоса «main.bundle» любым текстовым редактором, найти и изменить строчку
if (Array.isArray(data.data) data.data.indexOf(_miot.Service.account.ID) >= 0) < _this.setState(< isRepairUser: true >); >
if (Array.isArray(data.data)) < _this.setState(< isRepairUser: true >); >
- Если на телефоне Android 9 и ниже, то файл искать по пути /Android/data/com.xiaomi.smarthome/files/plugin/install/rn/1000004/XXXXXXX/android/main.bundle
- Если же установлен Android 10 и выше нужно:
- В настройках телефона предоставить приложению Mi Home разрешение на доступ к внешнему хранилищу;
- В корне памяти смартфона создать папку /ВНУТРЕННЯЯ_ПАМЯТЬ/vevs/files/ ;
- Выгрузить из памяти или полностью остановить Mi Home;
- Снова запустить MiHome и зайти в плагин пылесоса → После этого плагин должен перекачаться по нашему новому пути.
- Исправляем файл плагина main.bundle по следующему пути /ВНУТРЕННЯЯ_ПАМЯТЬ/vevs/files/ plugin/install/rn/1000004/XXXXXXX/android/main.bundle
2 Запускаем Михом, переходим в плагин пылесоса → меню настроек (три точки правом верхнем углу) → История уборок → 10-ть раз нажать на заголовок со статистикой уборок.
Лучший Моющий Робот Пылесос Xiaomi Mi Robot Vacuum Mop 2 Ultra

3 Переходим в меню «Sensor calibration» (калибровка сенсоров).

- Версия прошивки робота-пылесоса должна быть выше 1025, иначе ее необходимо обновить.
- Смартфон и пылесос должны быть подключены к одной сети Wi-Fi.
4 Устанавливаем пылесос на ровный пол. Для точности, наносим на полу метки (например наклеить на пол строительный скотч или использовать рисунок ламината), чтобы можно было относительно меток поправить пылесос после калибровки.

5 В меню «Sensor calibration» (Калибровка сенсоров) нажимаем «Gyroscope calibration» (Калибровка гироскопа).

В течение 10-ти секунд, после нажатия, робот-пылесос будет стоять не подвижно, затем выполнит 10 оборотов на месте. После выполнения 10-ти оборотов робот должен вернуться в исходное положение. Если есть какая-либо погрешность, то нужно вручную повернуть пылесос на исходную позицию и повторить калибровку.
После того как пылесос вернется в то же самое положение, нажимаем кнопку «Gyroscope move confirmation» (Подтверждение перемещения гироскопа).

ВАЖНО! Для последующих калибровок понадобится пространство на полу размером → длина 4-ре метра, ширина 1 метр. На пути движения не должно быть никаких преград и неровностей.
6 Устанавливаем робота на ровную поверхность → Нажимаем «Optical flow A calibration» (калибровка оптического потока А).

Робот-пылесос подтвердит выполнение команды голосовым сообщением → Проедет вперед 3 метра → Развернётся на 180° и должен вернуться в точку отправления. Если есть какие-то отклонения от исходной позиции, то нужно вручную выставить пылесос и повторить калибровку.

7 По аналогии с предыдущим пунктом выполняем «Optical flow B calibration» (калибровка оптического потока B).
ПРИМЕЧАНИЕ В карточке устройства данного пылесоса, в разделе файлы, прикреплены оригинальные инструкции от сервисного центра.
Источник: rumihome.ru
Полноценное голосовое управление робота-пылесоса Xiaomi через Яндекс.Станцию
Н аучил Алису управлять роботом-пылесосом Xiaomi Mi Robot Cleaner 1S. Помимо стандартных включение и выключение, она может отправить робота убираться в конкретную комнату и в конкретное место в комнате, изменять его мощность и узнать где робот находится в данный момент.
Xiaomi Mi Robot Cleaner 1S
Н е так давно, появилось желание обзавестись роботом-пылесосом, надоело каждый день убираться за кошкой, ибо шерсть и наполнитель из лотка ею разносится по всей квартире. Да и в целом, люблю, когда в квартире чисто. Стояла задача, помимо «пылесосных» функций, при выборе учесть ещё и «умные» функции пылесоса, что бы его можно было интегрировать в систему умного дома.
Выбор пал на модель Xiaomi Mi Robot Cleaner 1S, самый оптимальный по цене, качеству и функциональности. Делать полный обзор на него не буду, в интернете их полно, просто скажу, что со своими обязанностями как пылесоса он справляется. Иногда даже удивляешься откуда столько мусора и шерсти находит. Правда, если постелен ковролин или ковёр, мусор в ворсе застревает и для полной чистоты приходиться настраивать уборку на 2 круга, с первого раза не всё всасывает.
С амое главное что я хотел реализовать с помощью робота-пылесоса, это возможность зональной уборки по средствам голосового управления через Алису в Яндекс.Станции. Что бы по голосовой команде робот ехал убираться не по всей квартире, и не по всей комнате, а в конкретно указанное место. Представьте, к вам пришли гости и натоптали у порога.
Вы просто говорите Алисе «Уберись у порога» и она отправляет робота убираться у входной двери. Не надо никуда идти, ничего нажимать или открывать какие то приложения, сказали и всё. Или, готовили себе ужин и рассыпали соль со специями на пол (ой как не приятно босиком по этому ходить).
Пока кушаете, сказали «Алиса, уберись у стола на кухне» и готово, робот уберётся у стола, а не во всей кухне. Удобно же. Таких сценариев можно придумать каких душе угодно.
Робот убирается только возле порога
И значально Алиса такой функционал не поддерживает, робота можно только включить и выключить. Для открытия всех возможностей нужно иметь собственную систему умного дома, которая будет управлять роботом, например у меня стоит Home Assistant, а уже к ней подключить Алису (возможно, в будущем напишу подробнее, как всё подключить и настроить, пишите в комментариях, если интересно).
Источник: dzen.ru
DivanX10

Скачать готовую настройку класса и объекта пылесоса для импорта в MD можно здесь
Скачать полные настройки (класс и объекты, меню управления и сцена) для MD можно здесь
Скачать иконки пылесоса можно здесь. Иконки нарисованы в векторе, открывать в CoralDraw. Можно передалать их по своему вкусу и экспортировать в png. При экспорте указать размер пикселей, я выбрал для себя 28pix и разрешение 72dpi.
Обзор иконок

Скачиваем и устанавливаем программу Bluestack, можете и на телефон поставить, но мне удобнее было скопировать координаты в блокнот через Bluestack.
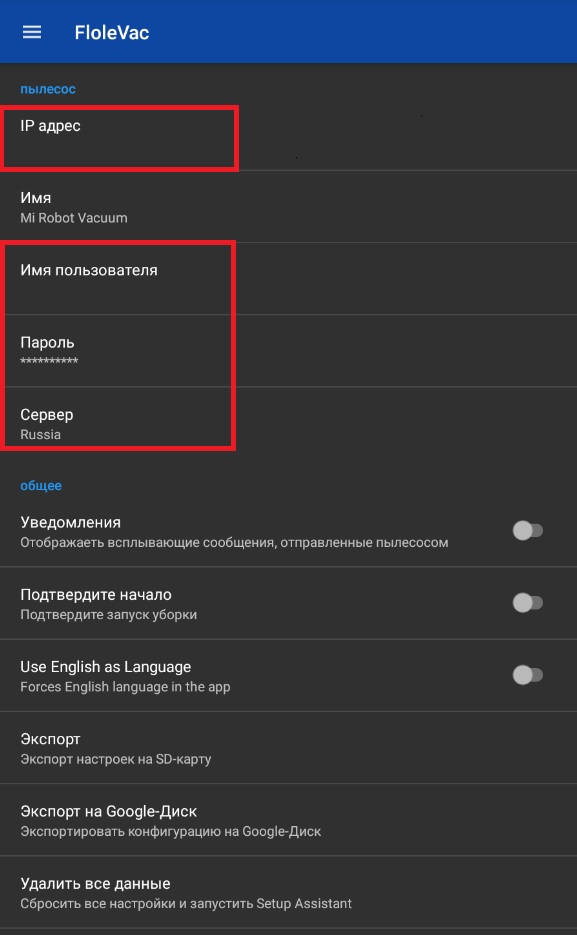
Скачиваем и устанавливаем программу FloleVac Now
Выбираем импорт из MiHome

Указываем логинпароль от Mi Home
Переходим в раздел карты и еще раз указываем логинпароль от Mi Home и выбираем сервер как в MiHome 

Переходим в раздел карты. Перед тем, как будем выбирать зоны, сначала должна быть построена карта. Выделяем зону уборки. Потом нажимаем и удерживаем кнопку «Очистить зону» до тех пор, пока не появится сообщение «Координаты скопированы». Больше 5-ти зон не удаться сделать, но можно выделять одну зону и копировать координаты и так можно делать бесконечно.

На основе полученных координатах можно создавать свои сценарии или методы, кому как удобно. Пример списка сценарии

Создаем сценарии и вписываем такой код с координатами.
Формат команды для zoned_clean: либо одна зона [zone1], либо список зон [zone1],[zone2]. [x1 Integer, y1 Integer, x2 Integer, y2 Integer, times Integer] [26234,26042,27284,26642,5] — убрать одну зону 5 раз [26234,26042,27284,26642,1],[26232,25304,27282,25804,2],[26246,24189,27296,25139,3] — убрать три зоны Формат команды для goto_target: [x Integer, y Integer] [24200,20200]
Для примера, свои координаты обнулил, а так вместо этих координат вы можете вставить свои координаты. Можно вставить в одной комнате до 5-ти зон.
setGlobal(‘Xiaomi_MiRobotVacuum.ZonedClean’, ‘[00000,00000,00000,00000,1],[00000,00000,00000,00000,1]’);
Как управлять пылесосом?
Управление пылесосм происходит отправкой через свойство command:
app_start — начать уборку;
app_stop — остановить уборку;
app_pause — приостановить уборку;
app_spot — прибрать участок вокруг пылесоса;
app_charge — отправить на базу и встать на зарядку;
find_me — посигналить, чтобы найти пылесос.
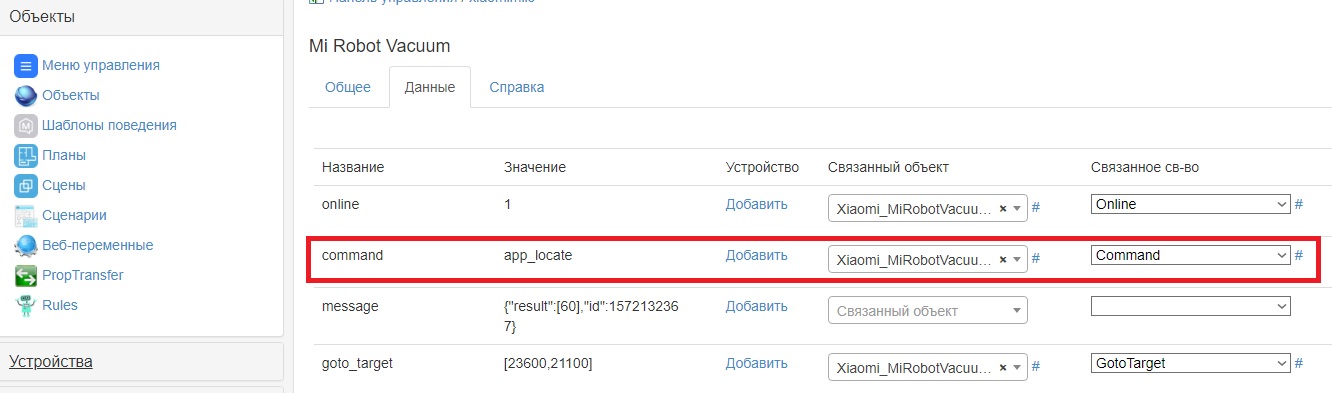
Само свойство command
Полный список команд можно посмотреть здесь
Описание метрик пылесоса
1)filter_work_life — уход, через сколько времени нужно будет заменить фильтр
2)map_present — Карта построена или нет 1 или 0
3)in_cleaning — запуск уборки
4)fan_power — мощность всасывания
5)dnd_enabled — режим «Не беспокоить»
6)custom_mode — режим уборки (Тихий, Сбалансированный, Турбо, Полная скорость)
7)sensor_dirty_life — очистка датчиков после 30 часов
8)clean_time — сколько времени затрачено на последнюю уборку
9)filter_work_time — через который промежуток времени нужно заменить фильтр
10)battery — уровень заряда
11)side_brush_work_life — индикатор времени работы боковой щетки, где через 200 часов нужно ее заменить
12)main_brush_work_life — индикатор времени работы основной щетки, где через 300 часов нужно ее заменить
13)state — цифровое обозначение состояния пылесоса
14)state_text — тестовое сообщение состояния пылесоса
15)online — статус сети
Пример того, что означают цифры state
Обозначение свойства «state»
Zoned cleaning|Зональная уборка — state 17
Charging|Зарядка — state 8
Back to home|Обратно на базу — state 6
Spot Cleaning|Чистка точки — state 11
Обозначение свойства «state_text»
Cleaning — Уборка
Zoned cleaning — Зональная уборка
Charging — Заряжается
Sleeping — Спит
Waiting — Ожидание
Pause — Пауза
Back to home — Обратно на базу
Going to target — Идет к указанной точке
Spot Cleaning — Чистка в указанной точке
Так выглядит мое меню управления пылесосом
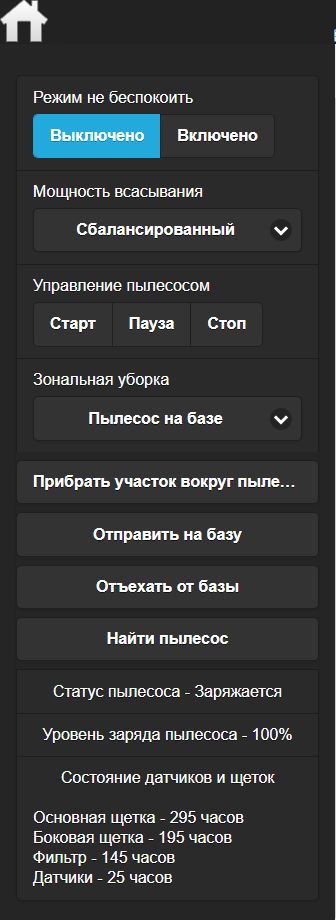
Боковое меню
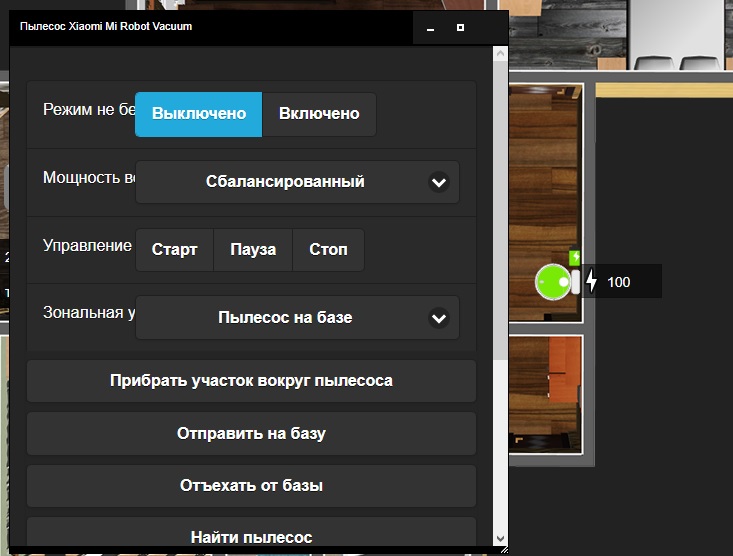
Всплывающее меню

Чтобы иконки менялись по статусу пылесоса, я в сценах выбрал изображение и присвоил каждому состоянию состояние устройства
Источник: connect.smartliving.ru