Успел взять на предзаказе потрясающий 3D сканер — Revopoint RANGE. Это один из самых современных и наиболее доступный сканер для крупных форматов: работает на расстоянии до 0.8 метра от объекта, с точностью 0.1 мм (!). Модель настолько популярная, что за короткое время набрала более 2 млн долларов на краудфандинговой платформе Kickstarter.

Технические характеристики представлены в списке ниже:
- Модель: Revopoint RANGE
- Тип: Лазерный инфракрасный сканер
- Область сканирования: 360 х 650 мм (при удалении 600 мм от объекта)
- Расстояние до объекта: 300. 800 см (в зависимости от сложности скана)
- Разрешение: до 0.1 мм
- Питание: 5 В
- Интерфейсы: USB-C, WiFi
- Вывод файлов: STL, PLY, OBJ
- Тип скана: быстрый, точный, цветной, монохромный
- Работа с маркерами: Да
- Работа с поворотным столом: Да
На настоящий момент подобный вариант является практически единственным сканером с большой областью скана за небольшие деньги. Аналоги стоят семизначные суммы, за исключением Scanform L5. Младшие модели Revopoint Mini, Pop видел в действии, но не устроили размерами скана. То же самое касается небольшого сканера от Creality3D. Так что новый RANGE был заказан без колебаний.
ТОП ЛУЧШИХ 3D сканеров. Какой 3д сканер выбрать? Обзор лучших 3d сканеров на рынке

Получил сканер Revopoint RANGE в комплектации Premium, которая включает оригинальный павербанк, держатель с поворотной головой, необходимые кабели для подключения к смартфонам и к ноутбуку, а также набор рефлективных маркеров для сканирования.

Лазерный сканер Revopoint RANGE представляет собой классический вариант устройства с разнесенными камерами, с подсветкой ИК-диапазона, встроенной обработкой (дальномер и т.д.) и интерфейсами для передачи снятых кадров на компьютер (или смартфон) с целью обработки пост-процессором. Сканер гораздо компактнее дорогостоящих аналогов, но заметно больше предыдущих моделей Revopoint.

Используется комбинированная подсветка (ИК-лазер), а также несколько камер, захватывающих не только изображение, но и текстуру объекта. То есть для Revopoint RANGE доступны цветные сканы (!).

По центру корпуса сканера расположено крепление для салазок. Устанавливается сканер на треногу, либо на держатель смартфона. Даже не верится, как в подобном компактном размере поместились все «мозги» для серьезного лазерного сканера.

В расширенную комплектацию Revopoint RANGE входит компактная тренога-штатив (алюминий+пластик), поворотная голова с салазками под крепление сканера, компактный павербанк на 4000 мАч (14.8 Втч) и выходом 5В/2А, держатель для смартфона. Причем поворотная голова съемная (1/4″), можно комбинировать в таком порядке: тренога, затем павербанк, затем держатель для смартфона, затем сканер. Можно использовать и другие фото аксессуары под резьбу 1/4″. То есть вся сборка помещается в одной руке, довольно лёгкая и удобная для сканирования.

Для работы сканер требует лишь питания (через MicroUSB-B 3.0), для связи с устройством можно использовать как WiFi, так и USB провод. Своего хранилища в сканере нет, все кадры он отсылает на устройство для обработки. На корпусе присутствует кнопка для быстрого запуска скана (можно пользоваться сканером одной рукой), а также индикатор.

Понравилось, что сканер оснащен встроенным гироскопом и трекером меток, и не требуется использовать отдельно гироподвес или неподвижно закреплять сканер при работах. В плане совместимости сканер получился всеядный — пробовал на нескольких девайсах, софт универсальный (мультиплатформенный), работает везде и с любым вариантом связи.

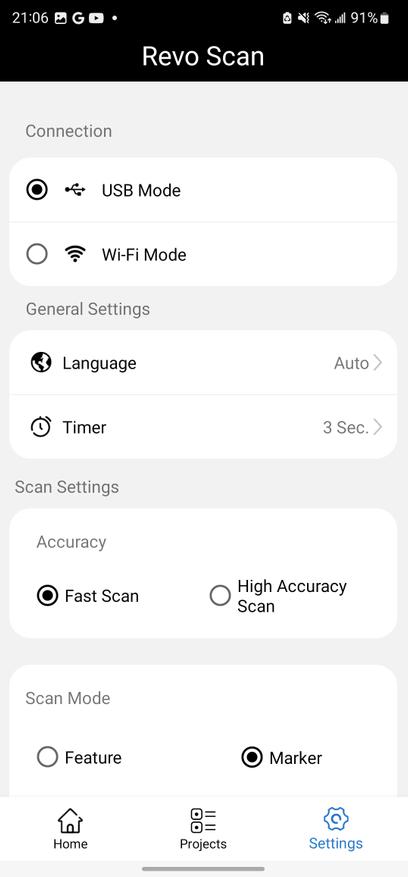
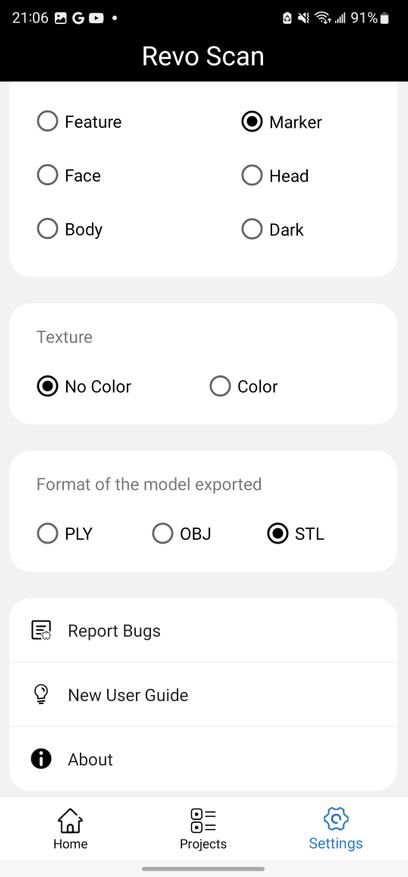
Сканер умеет работать как с компьютерами и ноутбуками (Win/Mac), так и со смартфонами/планшетами (Android/iOS). Способы подключения — по проводу (USB-C), так и по беспроводной сети WiFi. Соответственно выбираем приложение, устанавливаем, подключаем сканер. Настроек минимум — тип подключения, цветность, точность и тип скана. Также можно выбрать формат выходных данных (STL, PLY, OBJ).
Сложные объекты, особенно со сложной геометрией (углы под 90 градусов, зеркальные поверхности и т.д.) требуют предварительной подготовки — оклейке маркерами и матирования зеркальных элементов. Маркеров чем больше — тем лучше, по расположению маркеров сканер обеспечивает совмещение кадров скана.
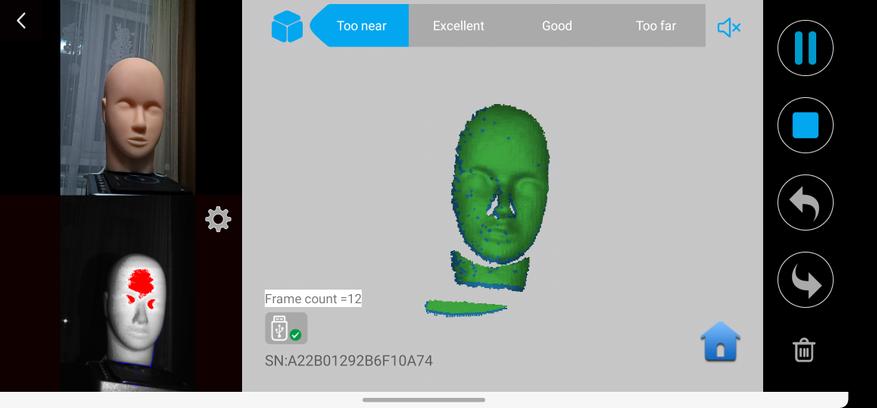
Для сканирования сложных поверхностей, в первую очередь — профиля лица, переключаем сканер в режим «Face» и повышаем детализацию сканирования (High Accuracy). Если сканируете своё лицо, тогда есть смысл развернуть держатель смартфона к фронтальной части сканера, контролируя процесс.
В зависимости от навыков сканирования, а также от самого объекта процесс обработки может занять минимальное время — в Revo Studio можно убрать лишние точки, области и другие артефакты. Результат можно экспортировать в один из доступных форматов.
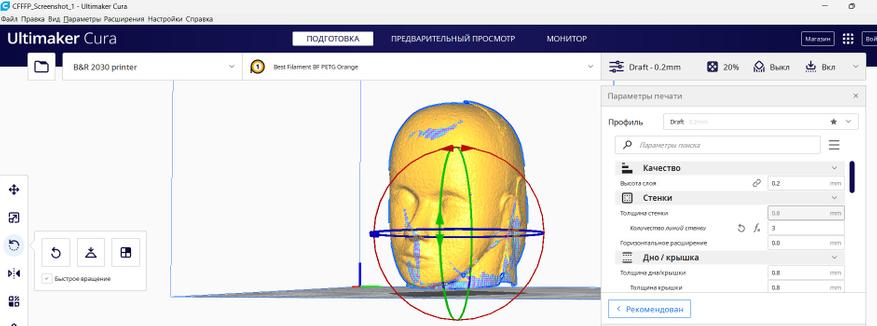
Например, в формат STL, доступный для печати на 3D принтере. Пример — результат скана, загруженный для подготовки печати в слайсер Cura.
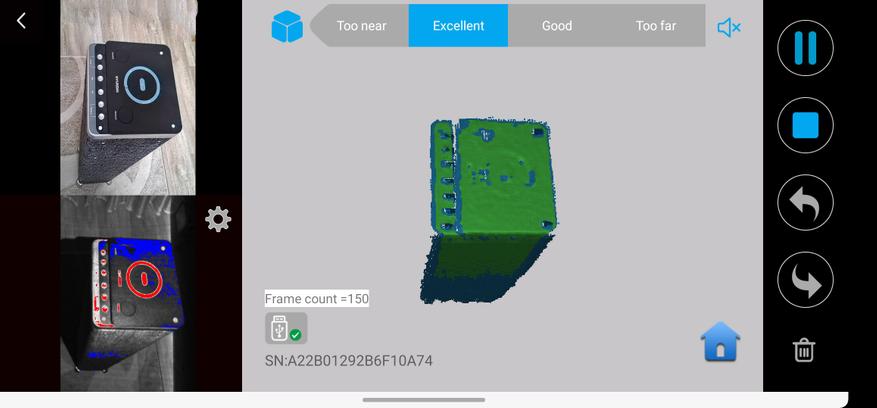
Пример процесса сканирования — Revopoint RANGE нужно неторопливо перемещать, добиваясь стабильного определения объекта на кадрах (кликабельно)
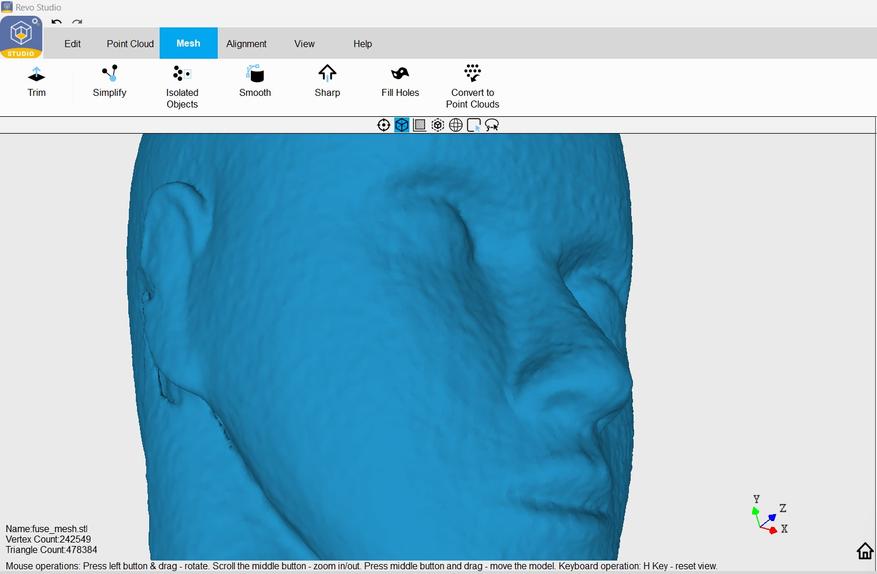
Пример вычищенной от артефактов и сшитой структуры точек. Отмечу высокое качество поверхности для сканера подобного класса. При желании можно применить реверс для перерисовки поверхности (или её части), а также использование приложения для оптимизации Mesh-структур (кликабельно)

Для более широкого понимания возможностей Revopoint RANGE прикладываю два интересных видеоролика (не мои), иллюстрирующие сканирование крупного объекта (дивана) и человека в полный рост.
Если планируете брать Revopoint RANGE, то рекомендую брать в Premium комплектации и с поворотным столом. Реально полезная штука. А также не пожалейте и возьмите побольше рефлективных меток-маркеров. Их вечно не хватает. О работе поворотного стола в паре со сканером подготовлю статью чуть позже.

Так что подобный сканер, как Revopoint RANGE — это реальное подспорье в хобби, творчестве и отличное начало собственного дела. Программное обеспечение Revopoint Studio позволяет довольно быстро чистить полученные сканы от артефактов и латать пропуски, экспортируя файлы в стандартные форматы, такие как STL. Открыть файл STL можно как в CAD-системе (например, Kompas3D), или сразу в слайсере для печати на 3D принтере.
С другими тестами и обзорами гаджетов, а также подборками оборудования вы можете ознакомиться по ссылкам ниже и в моем профиле.
Источник: www.ixbt.com
3д сканер

После покупки 3d принтера начал я косить в сторону 3d сканеров. Но ценник на них еще менее гуманный, чем на 3d принтера.
Самый недорогой вариант это китайский набор для самостоятельной сборки. Но и тот десятку стоит.
Из плюсов — можно собрать самому, распечатав корпус на своем принтере и докупив только электронику за 3000р. К тому же именно такая веб-камера (Logitech HD Webcam C270) у меня уже есть.
Из минусов — мало кому удавалось настроить это чудо на приемлемый результат и небольшие размеры сканируемой модели. А моим первым объектом для сканирования был клык с заднего кенгурина, в который мне недавно въехали. А им можно накрыть этот сканер.

Полный размер
Сейчас-то я их склеил, но после этого что-то захотелось на всякий случай иметь 3д модель этих клыков. В конторе с меня попросили от 3000р за скан одной модели…
В общем остановился я на программе David Laserscanner. Вот все, что нужно для работы с ней.
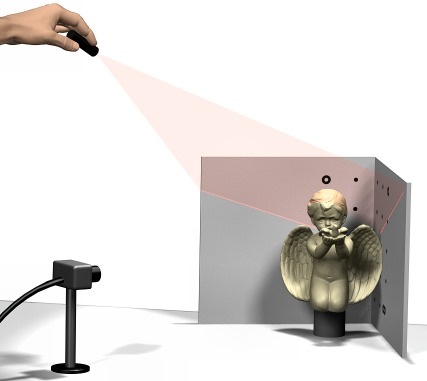
Угол с наклеенной калибровочной сеткой

Полный размер

Полный размер
Лазер дающий плоскость

Полный размер
Про настройки я рассказывать не буду. Проще глянуть здесь — Руководство пользователя о DAVID 2.x
Калибровочный угол можно распечатать на листе А4, можно (как я) на листе А1, можно заказать щит на 20 квадратных метров и отсканировать всю машину (бампер, спойлер, решетку и т.д.).
Вместо вебки можно использовать камеру. Но моя зеркалка не поддерживает передачи картинки напрямую через USB, а к камере не нашел кабель. К тому же HD качества вебкамеры за глаза для такого проекта.
Немаловажным является толщина лазерной линии. Чем тоньше линия — тем точнее передается рельеф. А так же расположение лазерной установки. В процессе сканирования она должна наклоняться вверх-вниз, но не в коем случае не перемещаться.
И небольшое видео, как все это работает.
Конечно пока это все собрано, как говорится, на коленке. Вебку нужно жестко прикрепить к углу, для лазера распечатать поворотный механизм. Но даже при таком сканировании точность поражает. Ведь готовая модель — это сшивка из нескольких сканов с разных ракурсов. А сшились они идеально, что говорит о точной передачи геометрии в каждом отдельном скане.
Этот метод хорошо подходит для моделей без острых граней. Острые грани при сканировании смазываются. Хотя если все закрепить и взять лазер по тоньше…
И самое главное модель не должна зеркалить. Все светоотражающее придется или шкурануть, или дунуть матовой краской.
Вот как-то так. Спасибо за внимание.
Источник: www.drive2.ru
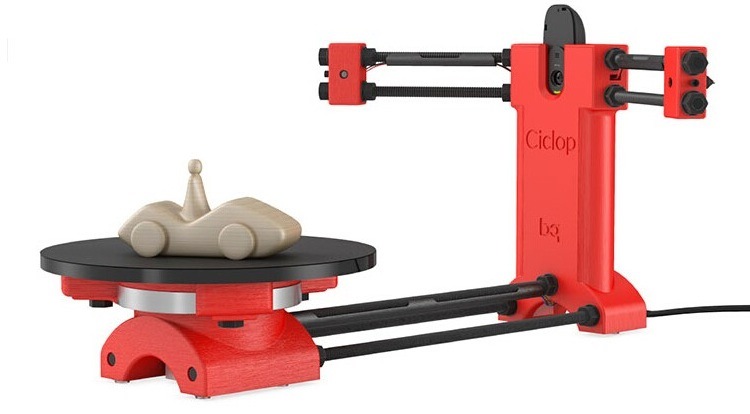
3d сканер Ciclop

В очередной раз магазин предложил взять на обзор что-нибудь. Поскольку меня давно интересовал вопрос применения данной штуки для нужд декоративной 3d-печати — я выбрал сканер.
Итак, сам сканер был разработан испанской компанией BQ, которая в настоящее время прекратила его поддержку (якобы из-за китайских подделок, но сомнительно. Сейчас данным сканером торгует и американская CowTech. Исходники для 3d печати частей сканера — лежат в свободном доступе на Thingiverse (там же ссылки на софт и электронику).

В комплекте имеем вот такую «рассыпуху»:
Сборка незамысловата, однако есть несколько моментов:
1. Спешить затягивать все гайки не стоит — придётся еще подстраивать геометрические размеры — сходимость лазеров в центре площадки, расстояния до поворотной платформы.
2. В моей стойке камера чуточку «болталась», на доли миллиметра — но этого хватило для перекоса картинки. Устранил подкладыванием вспененного материала.
4. Поворотная платформа была прозрачной и не имела покрытия (как в оригинале) — я покрасил ее plastidip-ом.
5. Проверяйте шаблоны калибровочной «шахматки». Не знаю как печатали ту, которая из моего комплекта — но пропорции квадратиков были нарушены. Взял из интернета и перепечатал сам.
6. Фокус камеры не настроен на расстояние до платформы. Снял крышку и подкрутил фокус по месту.




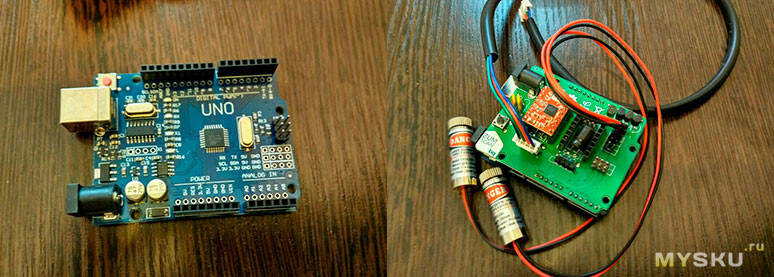
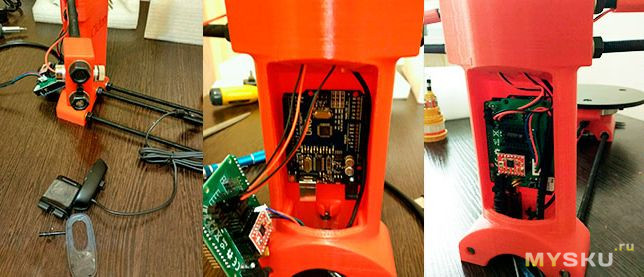
Как видим, «мозгами» сканера является обычная Arduino Uno в связки шилдом ZUM Scan и драйвером шагового двигателя A4988. Управляется хозяйство «родным» софтом Horus от BQ.
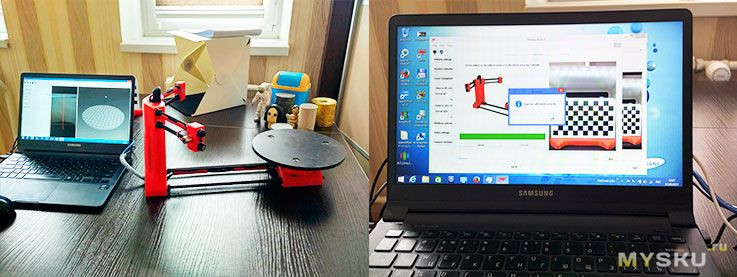
После сборки, сканер прошел калибровочные процедуры в родном софте Horus.

Поскольку к этому моменту я уже знал, что качество сканирования очень сильно зависит от качества освещения (стабильности, рассеянности, цветовой температуры) я заранее озаботился наличием маленького лайтбокса, чтобы хотя бы обеспечить мало-мальски сопоставимые условия для проб.

Подобрав «кандидатов» для проб, я приготовился.
Требования к объекту заявлены такие:
1. Объект должен быть больше 5х5 см, но меньше чем 20х20см
2. Объект должен быть непрозрачным и неподвижным
3. Объект должен весить не больше 3 кг
Затруднительно сканировать:
1. Блестящие, светящиеся объекты
2. Слишком темные объекты
3. Объекты с размытой поверхностью (например, мягкие игрушки)
Результатом сканирования является облако точек в формате PLY (которые потом необходимо преобразовать в поверхность). Вот здесь руководство для пост-обработки облака и подготовки STL-файла.
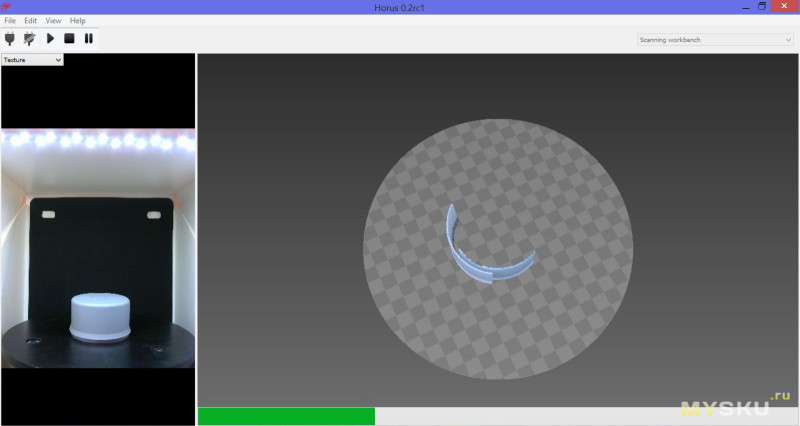
Почитав руководство по оптимизации сканирования, попробовать я решил с простого цилиндрического предмета.
После нескольких попыток я убедился, что имею распространенную проблему — несовпадения облаков точек от правого и левого лазера, да и с пропорциями вопрос.

Ничего путного по данному поводу кроме попытки откалибровать настройки вебкамеры (они не калибруются при работе мастера калибровки) найти не удалось (чувак по имени Иисус из саппорта BQ — давно не отвечает на вопросы). Для этого необходимо наделать несколько снимков с различными положениями калибровочной таблицы. Наделал. Положение улучшилось, но не до конца.
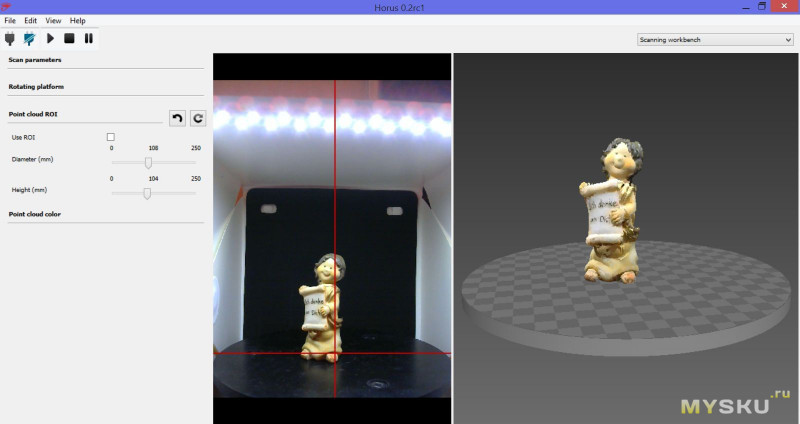
Пришлось ручками править калибровочный файл (calibration.json в папке Horus-a) и методом проб ошибок, сканируя цилиндрический предмет — добиваться совпадения облаков.
И вот вроде все ок: 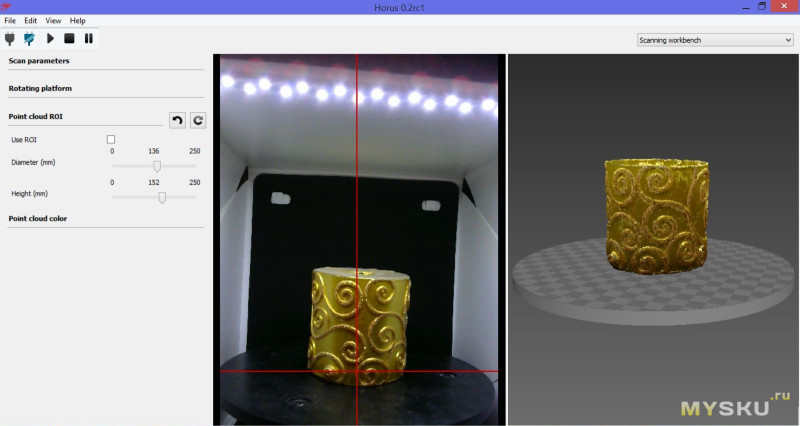
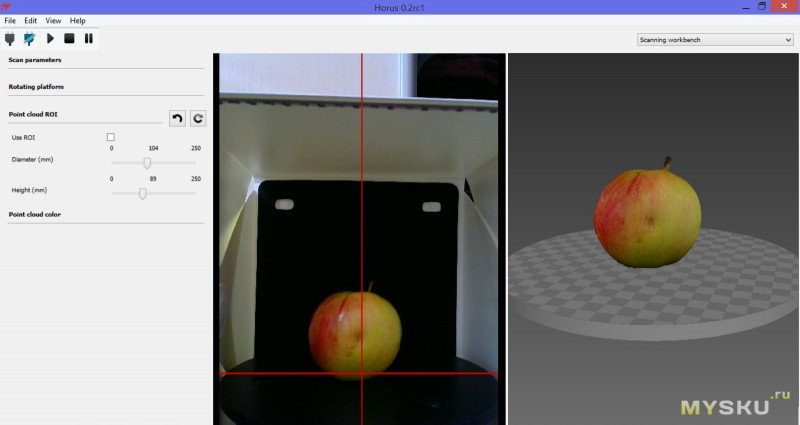
Но нет — на сложных предметах фрагменты облаков все равно порой не совпадают, к тому же образуется много «слепых» зон: 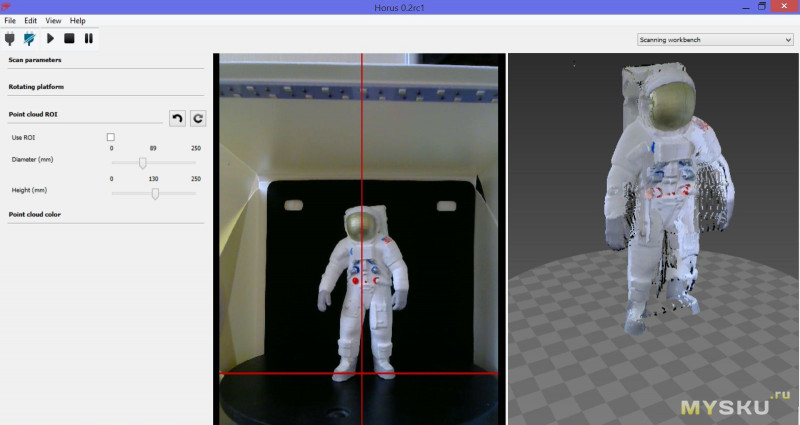
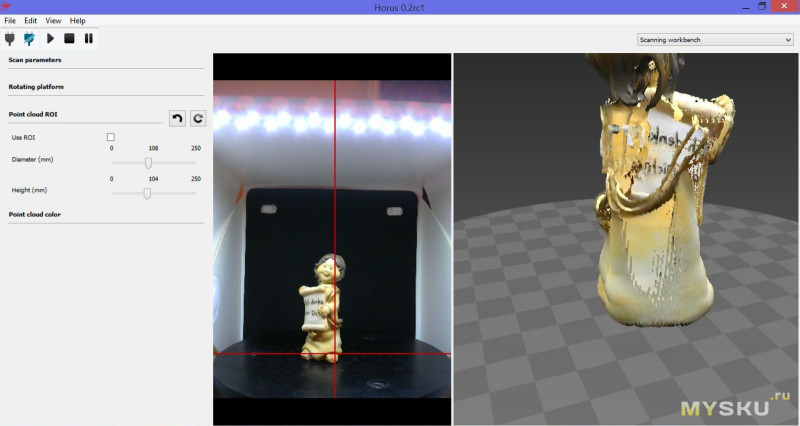
Кроме того, очевидно, что сканирование ярко красных предметов будет невозможно, во всяком случае с штатными лазерами.
Можно, конечно продолжать экспериментировать со сканированием отдельными лазерами и попытками в стороннем софте совместить все это хозяйство, а потом попытаться приводить в жизнеспособный для STL вид.
Все это напоминает один анекдот с корабликами в бутылках.
-Как ты делаешь кораблики в бутылках?
-В бутылку помещаю песок, силикатный клей, палочки и трясу.
Получается всякое говно, а иногда — кораблики.
В общем, я понял, что адептом подобного творчества не являюсь, и имею подозрение, что с нуля смоделировать предметы, которые по силу сканеру — проще.
А сложные — со сложными не справляется сканер в штатном режиме, маловато ему двух лазеров -остаются слепые зоны. Для устранения данной проблемы — надо сканировать в других положениях и потом опять мучиться с совмещением облаков. Нет уж, спасибо.
В итоге — штука сгодится только для изучения основ лазерного сканирования, для чего то более — абсолютно бесполезная. Нет, конечно, получить нечто очертаниями похожее на исходную модель — можно, но на этом (и это с учетом всех бубнов с обработкой облаков) — всё. Не зря видать испанцы закинули это дело.
Магазин подстраховался — в описании честно изложено, что результат зависит от положения планет и настроения тети Сони с третьего этажа. Опенсорс и все такое, давайте плясать вместе. Нет уж, спасибо.
Вывод — не брать, а если охота экстрима -собрать самому из того же, из чего товарищ из анекдота делает кораблики.
Товар для написания обзора предоставлен магазином. Обзор опубликован в соответствии с п.18 Правил сайта.
Планирую купить +9 Добавить в избранное Обзор понравился +101 +156
- 21 мая 2017, 22:19
- автор: silensilen
- просмотры: 21049
Источник: mysku.club